标签:总成 螺旋桨 逆时针 引脚 电机 pix 顺序 无人机 连接
https://ardupilot.org/copter/docs/connect-escs-and-motors.html
将每个 ESC 的电源 (+)、接地 (-) 和信号线按电机编号连接到自动驾驶仪的主输出引脚。在下面找到您的框架类型以确定电机的指定顺序。
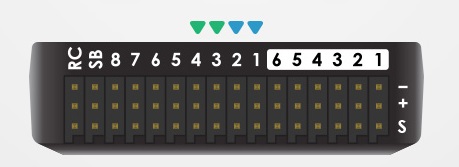
Pixhawk 输出引脚(编号)。前 4 个引脚采用颜色编码,用于连接 Quadframe
电机顺序图
下图显示了每种框架类型的电机顺序。数字表示自动驾驶仪的哪个输出引脚应连接到每个电机/螺旋桨。螺旋桨方向显示为绿色(顺时针,CW)或蓝色(逆时针,CCW)

电机顺序图图例
四轴飞行器


认识顺时针和逆时针螺旋桨
上图显示了两种类型的螺旋桨:顺时针(称为推进器)和逆时针(称为牵引器)。最可靠的是通过其形状识别正确的螺旋桨类型,如下所示。较厚的边缘是沿旋转方向移动的前缘。后缘是更激进的扇形,通常更薄。

使用 Mission Planner 电机测试检查电机编号
检查电机是否已正确连接的另一种方法是使用 Mission Planner 初始设置菜单中的“电机”测试。

标签:总成,螺旋桨,逆时针,引脚,电机,pix,顺序,无人机,连接 来源: https://www.cnblogs.com/gooutlook/p/16456426.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。