标签:std hamburger msgs 手把手 rclcpp advertisement msg 编写 ROS2
ROS2——手把手教你编写一个话题
话题简介
ROS2将复杂的机器人系统拆解成许多模块节点,而这些节点之间则是通过一个至关重要的通道完成数据交换的,这个通道就是“话题”。
一个节点可以通过多个话题向外发布数据,也可以同时订阅多个其他节点发布的话题,相当于话题是一个多对多的订阅/发布模型。
可见,话题是节点之间实现数据传输的重要途径,也是机器人各个子系统之间交换数据的重要方式。
下面, 我们将从一个实例出发, 手把手写一段话题程序
案例描述
来看一个案例:
- 有一家
KFC和一个饥肠辘辘的Customer. Customer给KFC10元钱就能买到一个汉堡, 这个Customer饿得很快, 每秒都要吃一个汉堡.KFC收到Customer发来的10元钱, 向Customer发送汉堡, 为了推销大鸡腿, 每5秒发布一条广告.
以上案例实际上就实现了一个话题, KFC和Customer是两个节点Node, 付钱/发送汉堡/发送广告即为发布者, 收钱/接收汉堡/收取广告即为订阅者.
程序实现
下面来编写这段程序
新建工作空间
mkdir -p ros2_ws/src
cd ros2_ws/src
mkdir -p: 递归创建目录,即使上级目录不存在,会按目录层级自动创建目录
新建功能包
ros2 pkg create customer_and_kfc --build-type ament_cmake --dependencies rclcpp std_msgs
使用ament_cmake作为编译类型, 并使用依赖rclcpp和std_msgs
在ros2_ws/src/customer_and_kfc/src下创建KFC.cpp和Customer.cpp
编写KFC节点
直接献出程序, 每句都有注释, 看不懂你打我
// rclcpp库
#include "rclcpp/rclcpp.hpp"
// 基本消息类型库
#include "std_msgs/msg/string.hpp"
#include "std_msgs/msg/u_int32.hpp"
// 这样在下文可以使用1000ms这种表示方式
using namespace std::chrono_literals;
// 占位符,下面会详细说
using std::placeholders::_1;
// 创建一个类节点,起名叫做KFCNode,继承自Node,这样就能使用Node所有的功能了
class KFCNode : public rclcpp::Node
{
public:
// 构造函数,第一个参数为节点名称, 并初始化count为1
KFCNode(std::string name) : Node(name), count(1)
{
// 打印KFC的自我介绍
// c_str()函数是string类的一个函数,作用是把string类型转化为char类型(%s要求是一个字符串)
RCLCPP_INFO(this->get_logger(), "大家好, 我是%s的服务员.",name.c_str());
// 创建发布者, 发布hamburger, 发布的消息类型为<std_msgs::msg::String>
// 格式: 发布者名字 = this->create_publisher<要发布的话题类型>("要发布的话题名称", 通信Qos);
pub_hamburger = this->create_publisher<std_msgs::msg::String>("hamburger", 10);
// 创建发布者, 发布advertisement
pub_advertisement = this->create_publisher<std_msgs::msg::String>("advertisement", 10);
// 创建定时器,每5000ms发布一个广告
// 格式: 定时器名字 = his->create_wall_timer(1000ms, std::bind(&定时器回调函数, this));
advertisement_timer = this->create_wall_timer(5000ms, std::bind(&KFCNode::advertisement_timer_callback, this));
// 创建订阅者,订阅money
// 格式: 订阅者名字 = this->create_subscription<要订阅的话题类型>("要订阅的话题名称", 通信Qos, std::bind(&订阅者回调函数, this, _1));
// std::bind()是干啥的呢? 举个例子:
// auto f = std::bind(fun, placeholders::_2, placeholders::_1, 80);
// f(60,70) 等效于 fun(70, 60, 80)
// 还记得前文提到的占位符吗,placeholders::_1 就是f(60,70) 中的那个参数"1"
sub_money = this->create_subscription<std_msgs::msg::UInt32>("money_of_hamburger", 10, std::bind(&KFCNode::money_callback, this, _1));
}
private:
// 定义一个汉堡售出计数器
// 在32位系统中size_t是4字节的,在64位系统中,size_t是8字节的,这样利用该类型可以增加程序移植性。
size_t count;
// 声明一个定时器
rclcpp::TimerBase::SharedPtr advertisement_timer;
// 声明一个发布者,用于发布汉堡
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr pub_hamburger;
// 声明一个订阅者,用于收钱
rclcpp::Subscription<std_msgs::msg::UInt32>::SharedPtr sub_money;
// 声明一个发布者,用于发布广告
rclcpp::Publisher<std_msgs::msg::String>::SharedPtr pub_advertisement;
// 广告定时器回调函数(无参数)
void advertisement_timer_callback()
{
// 定义一个String类型的字符串, 其中字符串存在.data中, %s使用时别忘了使用.c_str()转换为char类型.
auto str_advertisement = std_msgs::msg::String();
str_advertisement.data = "大鸡腿降价啦";
RCLCPP_INFO(this->get_logger(), "KFC发布了一个广告:%s", str_advertisement.data.c_str());
pub_advertisement->publish(str_advertisement);
}
// 收钱订阅者回调函数(有参数, 参数类型跟上面订阅者订阅的参数类型相同, 注意要加上::SharedPtr, 因为传进来的是一个指针)
void money_callback(const std_msgs::msg::UInt32::SharedPtr msg)
{
// 如果收到了十元钱,才发布汉堡. 订阅的信息在msg->data中
if(msg->data == 10)
{
RCLCPP_INFO(this->get_logger(), "收款 %d 元", msg->data);
// 字符串流
auto str_hamburger_num = std_msgs::msg::String();
str_hamburger_num.data = "第" + std::to_string(count++) + "个汉堡";
RCLCPP_INFO(this->get_logger(), "这是我卖出的%s", str_hamburger_num.data.c_str());
// 发布字符串流
// 发布就这么写 "发布器->publish(要发布的);", 简单吧
pub_hamburger->publish(str_hamburger_num);
}
}
};
int main(int argc, char **argv)
{
// 初始化rclcpp
rclcpp::init(argc, argv);
// 产生一个KFC的节点
auto node = std::make_shared<KFCNode>("KFC");
// spin函数: 一旦进入spin函数,相当于它在自己的函数里面死循环了。只要回调函数队列里面有callback函数在,它就会马上去执行callback函数。如果没有的话,它就会阻塞,不会占用CPU。注意不要再spin后面放其他东西, 他们都不会执行的
rclcpp::spin(node);
// 检测退出信号(ctrl+c)
rclcpp::shutdown();
return 0;
}
编写Customer节点
此段程序与上面相同的语句不再解释, 请读者自行类比
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
#include "std_msgs/msg/u_int32.hpp"
// 这样就能使用1000ms这种表示方式
using namespace std::chrono_literals;
//占位符
using std::placeholders::_1;
using std::placeholders::_2;
// 创建一个类节点,名字叫做CustomerNode,继承自Node.
class CustomerNode : public rclcpp::Node
{
public:
// 构造函数,第一个参数为节点名称
CustomerNode(std::string name) : Node(name)
{
// 打印Customer的自我介绍
RCLCPP_INFO(this->get_logger(), "大家好,我是一个%s.",name.c_str());
// 创建订阅者,订阅hamburger
// 占位符还记得吗? 复习一下, 此处的_1 表示const std_msgs::msg::String::SharedPtr msg
sub_hamburger = this->create_subscription<std_msgs::msg::String>("hamburger", 10, std::bind(&CustomerNode::hamburger_callback, this, _1));
// 创建订阅者,订阅advertisement
sub_advertisement = this->create_subscription<std_msgs::msg::String>("advertisement", 10, std::bind(&CustomerNode::advertisement_callback, this, _1));
// 创建定时器,每1000ms饿一次
hungry_timer = this->create_wall_timer(1000ms, std::bind(&CustomerNode::hungry_timer_callback, this));
// 创建发布者,发布money
pub_money = this->create_publisher<std_msgs::msg::UInt32>("money_of_hamburger", 10);
// 给money赋值
money.data = 10;
//第一次给钱
pub_money->publish(money);
RCLCPP_INFO(this->get_logger(), "我饿了, 我要吃汉堡! 付款 %d 元", money.data);
}
private:
// 新建一张钱
std_msgs::msg::UInt32 money;
// 声明一个定时器
rclcpp::TimerBase::SharedPtr hungry_timer;
// 声明一个订阅者,用于订阅发出的汉堡
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr sub_hamburger;
// 声明一个发布者,用于给KFC钱
rclcpp::Publisher<std_msgs::msg::UInt32>::SharedPtr pub_money;
// 声明一个订阅者,用于订阅广告
rclcpp::Subscription<std_msgs::msg::String>::SharedPtr sub_advertisement;
// 汉堡订阅者回调函数
void hamburger_callback(const std_msgs::msg::String::SharedPtr msg)
{
RCLCPP_INFO(this->get_logger(), "这是我吃的 %s ", msg->data.c_str());
}
// 饥饿定时器回调函数
void hungry_timer_callback()
{
RCLCPP_INFO(this->get_logger(), "我又饿了, 还想再吃一个! 付款 %d 元", money.data);
pub_money->publish(money);
}
// 广告订阅者回调函数
void advertisement_callback(const std_msgs::msg::String::SharedPtr msg)
{
RCLCPP_INFO(this->get_logger(), "我收到了一条广告: %s ", msg->data.c_str());
}
};
int main(int argc, char **argv)
{
//初始化rclcpp
rclcpp::init(argc, argv);
//产生一个Customer的节点
auto node = std::make_shared<CustomerNode>("Customer");
//运行节点,并检测退出信号
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
Cmakelist.txt
如果新建功能包的时候没有加--dependencies rclcpp std_msgs等功能包, 则需要手动添加: (任意位置均可)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
下面两对代码的作用是:
add_executable() 让编译器编译Customer.cpp和KFC.cpp这两个文件. 并生成可执行文件Customer_node和KFC_node
ament_target_dependencies 添加编译的依赖
add_executable(Customer_node src/Customer.cpp)
ament_target_dependencies(Customer_node rclcpp std_msgs)
add_executable(KFC_node src/KFC.cpp)
ament_target_dependencies(KFC_node rclcpp std_msgs)
将编译好的文件安装到install/customer_and_kfc/lib/customer_and_kfc下
install(TARGETS
Customer_node
KFC_node
DESTINATION lib/${PROJECT_NAME}
)
package.xml
同样地, 新建功能包的时候没有加--dependencies rclcpp std_msgs等功能包, 则需要手动添加, 放置于<package>标签下
<depend>rclcpp</depend>
<depend>std_msgs</depend>
也可自行修改下面这些声明, 与实现功能无关, 但是最好写全
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="fanziqi@fanziqi.site">fanziqi</maintainer>
<license>TODO: License declaration</license>
编译
--packages-select指定编译customer_and_kfc功能包
colcon build --packages-select customer_and_kfc
刷新环境
echo "source /ros2_ws/install/setup.zsh" >> ~/.bashrc
source ~/.bashrc
运行
新建一个终端窗口, 运行Customer节点
ros2 run customer_and_kfc Customer_node
再另新建一个终端, 运行KFC节点
ros2 run customer_and_kfc KFC_node
此时应该可以看见:
Customer端:

KFC端:

经验证, 需求全部实现~
相关工具
rqt_graph
使用rqt_graph这个工具可以可视化显示节点和话题的连接关系
另起一个终端, 输入
rqt_graph
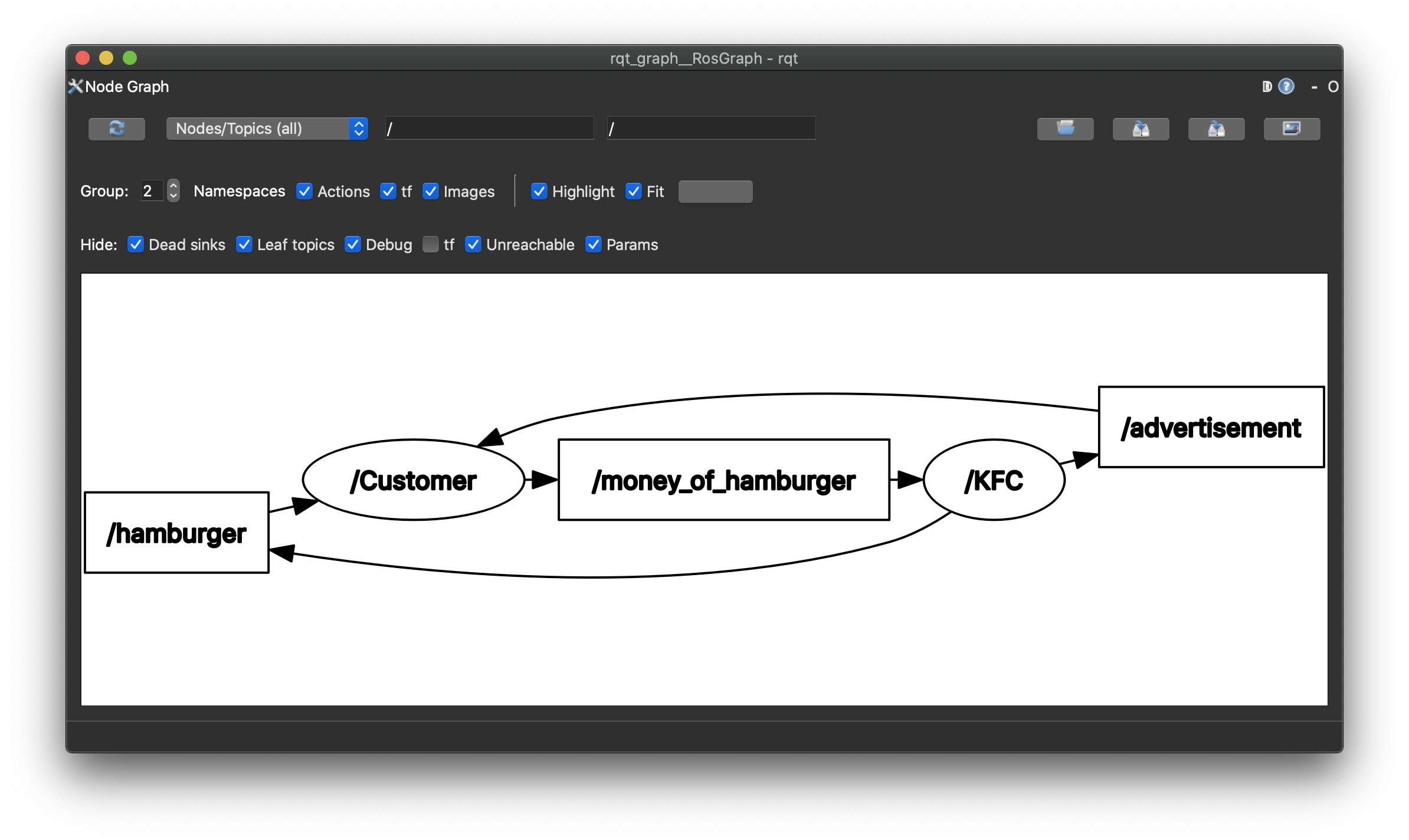
上图清晰地展示了ROS计算图的网络形态, 可以清楚地看出一个节点的输入和输出是什么.
ros2 topic
查看系统中所有话题
ros2 topic list

想具体查看每个话题传输的数据类型, 则添加-t
ros2 topic list -t

输出实时话题内容
ros2 topic echo /hamburger
查看主题信息
ros2 topic info /hamburger
查看话题的数据类型
节点之间要想成功建立数据传输,必须发布和订阅同样数据类型的消息,发布者发布的是速度指令,订阅者想订阅位置信息可是行不通的。
上文用ros2 topic list -t查看得知, /advertisement的类型为std_msgs/msg/String
通过如下指令查看这个数据类型的具体数据结构
ros2 interface show std_msgs/msg/String

可以看到, std_msgs/msg/String中包含了string data
发布一个话题消息
ros2 topic pub /test_topic std_msgs/msg/String 'data: "123"'

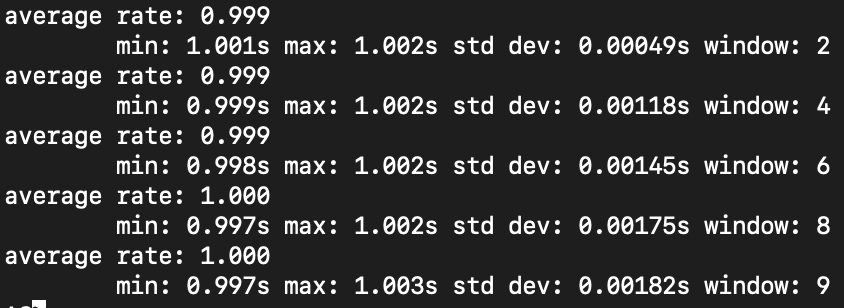
查看某一个话题的发布频率
ros2 topic hz /hamburger
标签:std,hamburger,msgs,手把手,rclcpp,advertisement,msg,编写,ROS2 来源: https://blog.csdn.net/oXiaoLingTong/article/details/120594908
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。