标签:03 yolov4 训练 cfg result visdrone 548 data
准备
参见这篇,不再赘述,
注意labels有没有错误,如w,h为0,重复标注等,在转换代码中加入判断滤除即可。
数据只用了task1的图片集。
配置
anchors
./[darknet](https://github.com/AlexeyAB/darknet) detector calc_anchors data/visdrone.data -num_of_clusters 8 -width 800 -height 800
5, 10, 9, 23, 19, 17, 17, 41, 37, 32, 31, 72, 65, 65, 97,134
显存不够的将网络大小改为416,608等
visdrone.cfg
由于visdrone数据集大部分是中小目标,所以去掉yolov4最后一个yolo层,直接删除第二个yolo层以下即可,更新anchor,
classes改为10,num改为8表示两个scale,每个scale包含4个anchor,相应filters从255改为60((10+5)*4),最后一层配置如下:
[convolutional]
size=1
stride=1
pad=1
filters=60
activation=linear
[yolo]
mask = 4,5,6,7
anchors = 5, 10, 9, 23, 19, 17, 17, 41, 37, 32, 31, 72, 65, 65, 97,134
classes=10
num=8
jitter=.3
ignore_thresh = .7
truth_thresh = 1
scale_x_y = 1.1
iou_thresh=0.213
cls_normalizer=1.0
iou_normalizer=0.07
iou_loss=ciou
nms_kind=greedynms
训练(2080Ti, 32G, i5)
使用ultralytics的实现,内存小的去掉cache-images,指定img-size大小和网络大小相同可避免内部再次resize,需屏蔽以下行
assert math.fmod(imgsz_min, gs) == 0, '--img-size %g must be a %g-multiple' % (imgsz_min, gs)
如果中途中断则使用resume(官方不建议,直接重新train),应该是权重文件中存有optimizer等信息,如果担心修改参数后对再次训练有影响,可转换为darknet权重,
由于存在很多难分样本,将fl_gamma设为2可启用focal loss
python3 train_visdrone.py --cfg cfg/visdrone.cfg --data data/visdrone.data --weights weights/yolov4.conv.137 --cache-images --img-size 800 800 --epochs 300 --batch-size 2
python3 train_visdrone.py --cfg cfg/visdrone.cfg --data data/visdrone.data --resume --cache-images --img-size 800 800 --epochs 300 --batch-size 2
from models import *
convert('cfg/visdrone.cfg', 'weights/best.pt')
为了方便在Tensorboard中对比查看,可作如下改动:
# Tensorboard
if tb_writer:
# tags = ['train/giou_loss', 'train/obj_loss', 'train/cls_loss',
# 'metrics/precision', 'metrics/recall', 'metrics/mAP_0.5', 'metrics/F1',
# 'val/giou_loss', 'val/obj_loss', 'val/cls_loss']
# for x, tag in zip(list(mloss[:-1]) + list(results), tags):
# tb_writer.add_scalar(tag, x, epoch)
result_value = list(mloss[:-1]) + list(results)
tb_writer.add_scalars('giou_loss', {'train': result_value[0], 'val': result_value[7]}, epoch)
tb_writer.add_scalars('obj_loss', {'train': result_value[1], 'val': result_value[8]}, epoch)
tb_writer.add_scalars('cls_loss', {'train': result_value[2], 'val': result_value[9]}, epoch)
tb_writer.add_scalars('metrics_PR', {'precision': result_value[3], 'recall': result_value[4]}, epoch)
tb_writer.add_scalars('metrics_AF', {'mAP_0.5': result_value[5], 'F1': result_value[6]}, epoch)
验证:
python3 test.py --cfg cfg/visdrone.cfg --data data/visdrone.data --weights weights/best.pt --img-size 800
Class Images Targets P R mAP@0.5 F1:
all 548 3.88e+04 0.236 0.379 0.262 0.288
pedestrian 548 8.84e+03 0.17 0.253 0.152 0.203
people 548 5.12e+03 0.107 0.151 0.0496 0.125
bicycle 548 1.29e+03 0.125 0.19 0.0895 0.151
car 548 1.41e+04 0.458 0.644 0.578 0.535
van 548 1.98e+03 0.196 0.539 0.376 0.287
truck 548 750 0.259 0.489 0.342 0.338
tricycle 548 1.04e+03 0.284 0.366 0.234 0.32
awning-tricycle 548 532 0.166 0.28 0.108 0.208
bus 548 251 0.397 0.554 0.504 0.463
motor 548 4.89e+03 0.198 0.325 0.187 0.246
Speed: 20.0/148.7/168.7 ms inference/NMS/total per 800x800 image at batch-size 16
修改visdrone.data中valid的路径为VisDrone2019-DET-test-dev所在路径可验证测试集
Class Images Targets P R mAP@0.5 F1:
all 1.61e+03 7.51e+04 0.224 0.333 0.231 0.264
pedestrian 1.61e+03 2.1e+04 0.121 0.141 0.0814 0.13
people 1.61e+03 6.38e+03 0.0615 0.0593 0.0141 0.0604
bicycle 1.61e+03 1.3e+03 0.141 0.144 0.0709 0.143
car 1.61e+03 2.81e+04 0.38 0.581 0.486 0.46
van 1.61e+03 5.77e+03 0.213 0.463 0.309 0.292
truck 1.61e+03 2.66e+03 0.26 0.549 0.411 0.353
tricycle 1.61e+03 530 0.134 0.275 0.0989 0.18
awning-tricycle 1.61e+03 599 0.236 0.289 0.15 0.259
bus 1.61e+03 2.94e+03 0.536 0.611 0.58 0.571
motor 1.61e+03 5.84e+03 0.161 0.222 0.112 0.187
Speed: 20.2/178.3/198.5 ms inference/NMS/total per 800x800 image at batch-size 16

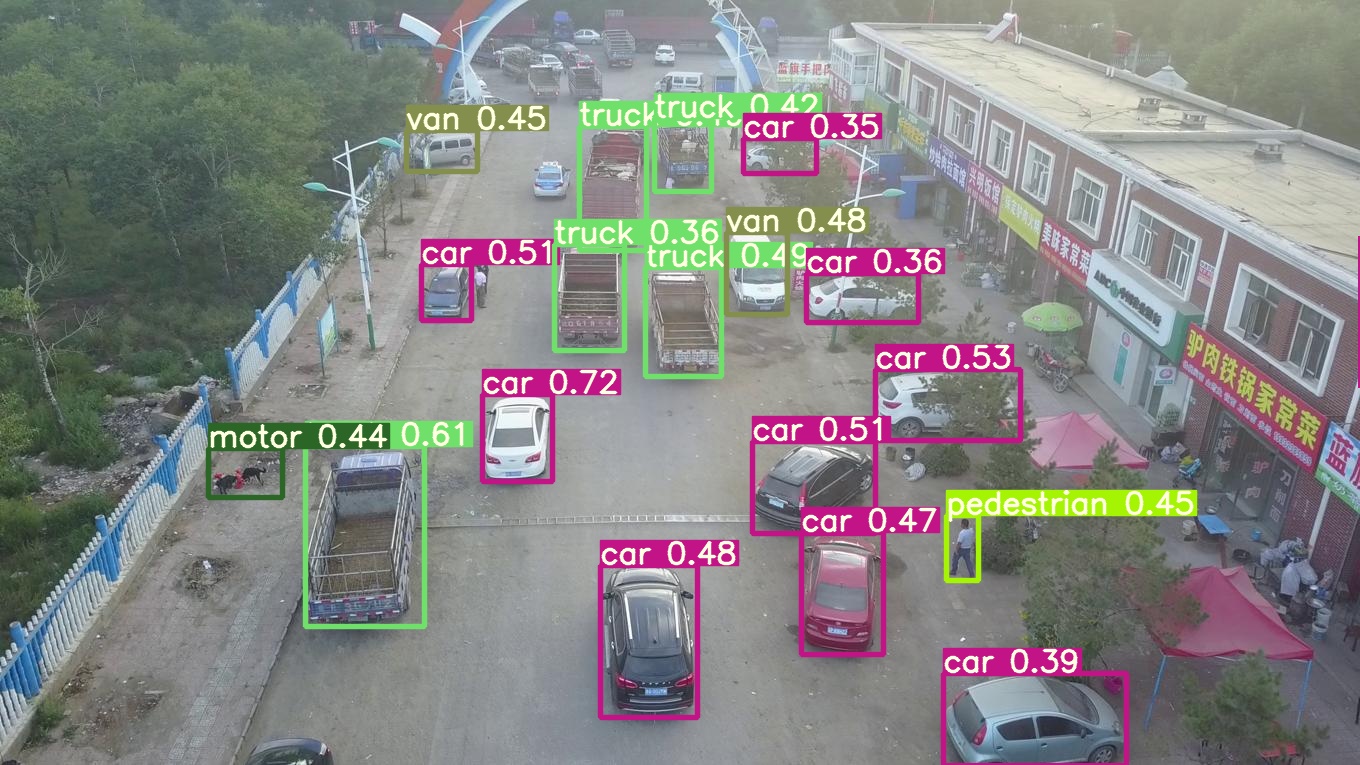
可以看出在小目标上效果很差,有时间用rcnn试试。
最终配置和权重下载,提取码: 74s4
标签:03,yolov4,训练,cfg,result,visdrone,548,data 来源: https://www.cnblogs.com/chenzhengxi/p/13033124.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。