标签:Offboard 离线 模式 返航 无人机 飞行 悬停 默认值
https://zhuanlan.zhihu.com/p/43985306
无人机初级篇系列第 15讲:飞型模式
三、位置模式 / 定点模式(Position / Hold)
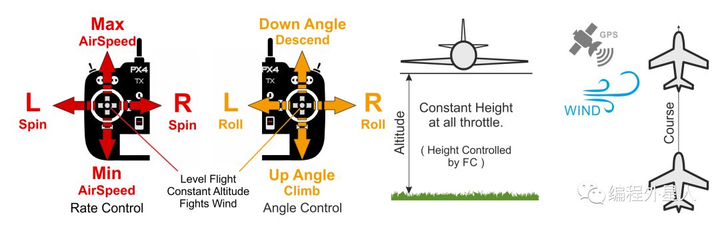
位置模式在油门控制方面与高度模式相同,都是可以保持定高飞行,而在水平飞行方面位置模式下,遥控器的滚转和俯仰通道控制的飞机的前后飞行和左右飞行的速度。也就是说当遥控器的滚转和俯仰通道在中心位置时,飞机会在当前位置上保持不动,也就是在三维坐标系下的xyz坐标不变。这也就与Hold模式是相同的功能。这通常需要全球定位系统GPS的支持,如果没有GPS的定位,无人机将无法进入位置模式。当然,有条件的读者也可以使用其它传感器来实现无人机的定位,例如在室内的动作捕获摄像机,或无人机自身的多目摄像头等等。
参数说明:
MPC_HOLD_DZ 在滚转和俯仰通道偏离中心位置小于阈值时为Hold模式,即保持当前位置不动,默认值为:0.1(即10%)。
MPC_VEL_MANUAL 水平飞行速度最大值,默认值: 5 m/s。
四、任务模式(Mission)
五、起飞模式 / 降落模式(Takeoff / Land)
起飞机模式与降落模式即为一个相对独立的飞行功能,可以实现一键起飞和降落,我们只需要对其参数做一些说明即可:
MIS_TAKEOFF_ALT 起飞高度,到达此高度后悬停,默认值为:2.5m
MPC_TKO_SPEED 起飞速度,在起飞模式下上升的速度,默认值为:1.5m/s
MPC_LAND_SPEED 着陆速度,在降落模式下下降的速度,默认值为:1m/s
COM_DISARM_LAND 着陆后多久自动锁定电机,默认值为:0.5s
离线模式指的是无人机可以在脱离遥控器控制的情况下离线飞行,但前提是需要有地面站指令(目前PX4采用的是Mavlink协议与地面站通讯)对飞机进行控制。在此模式下,地面站对无人机的控制指令比较简单。例如:起飞、悬停、执行预设任务、指定目标点飞行、返航、着陆等等。
参数说明:
COM_OF_LOSS_T 数传信号丢失时间,默认值为10s
COM_OBL_ACT 数传信号丢失后,保护动作:0:着陆,1:定点,2:返航
COM_OBL_RC_ACT 数传信号丢失,但遥控器信号正常,切换模式,1: 高度模式, 2: 手动模式, 3: 返航模式 , 4: 着陆模式.
六、返航模式(Return)
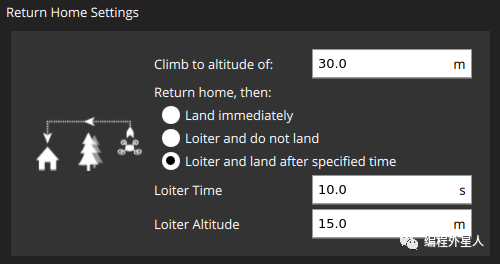
返航模式是一个安全保护模式,它允许无人机在紧急情况下切换到返航模式,并返回到起飞点(Home Position),返航模式一共有有5个阶段:
1.爬升:上面图解已经表示的很清楚了,飞机在返航前为了避免与中途的障碍物发生碰撞,所以在返航前通常都是要爬升到指定的高度。
2.返航:向起飞点的位置飞行,并一直保持爬升的高度,避免与中途的障碍物发生碰撞。
3.下降:到达起飞点之后,开始下降。
4.悬停:到达悬停点之后,开始悬停。
5.降落:到达悬停时间之后,降落。
参数说明:
RTL_RETURN_ALT 返航高度,默认值为:30m
RTL_DESCEND_ALT 悬停高度,默认值为:15m
RTL_LAND_DELAY 悬停时间,默认值为:30s
RTL_MIN_DIST 触发上升到安全高度的最小水平距离TL_RETURN_ALT,如果飞机水平靠近起飞点则以当前高度返回,而不是先上升到RTL_RETURN_ALT。
十、外部控制模式(Extern control)
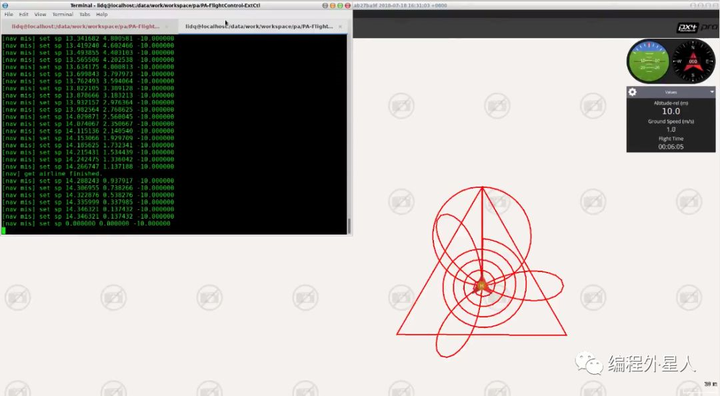
作者自己开发了一个叫作外部控制的飞行模式,采用了Pixhawk(运行PX4飞控)+ RaspberryPI3(运行外部控制器程序)一起控制飞行。它们之间使用串口进行通讯,Pixhawk将无人机当前的状态(系统状态、姿态、速度、位置)实时发送给RaspberryPI3,而RaspberryPI3根据飞机当前的状态和租航线规划自动计算飞机当前的期望(期望位置、期望速度和期望姿态),并实时发送给Pixhawk,Pixhawk运行PX4程序控制飞机根据当前的期望值进行飞行。下图是无人机搭载外部控制飞行的结果:
标签:Offboard,离线,模式,返航,无人机,飞行,悬停,默认值 来源: https://www.cnblogs.com/gooutlook/p/16513723.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。