标签:frac 梯度 神经网络 Deep beta Learning theta alpha dW
本文为吴恩达 Deep Learning 笔记
深度学习的实用层面
概念
训练 / 验证 / 测试:
Training Set 训练集
Development Set 验证集
Test Set 测试集
偏差 / 方差:
Bias 偏差
Variance 方差
Underfitting 欠拟合
Overfitting 过拟合
Optimal Error / Bayes Error 理想误差 / 贝叶斯误差
-
对于猫的识别,假设理想误差为 \(0\%\),则:
High Bias Low Bias & Low Variance High Variance High Bias & High Variance 训练集误差 \(15\%\) \(0.5\%\) \(1\%\) \(15\%\) 测试集误差 \(16\%\) \(1\%\) \(11\%\) \(30\%\)
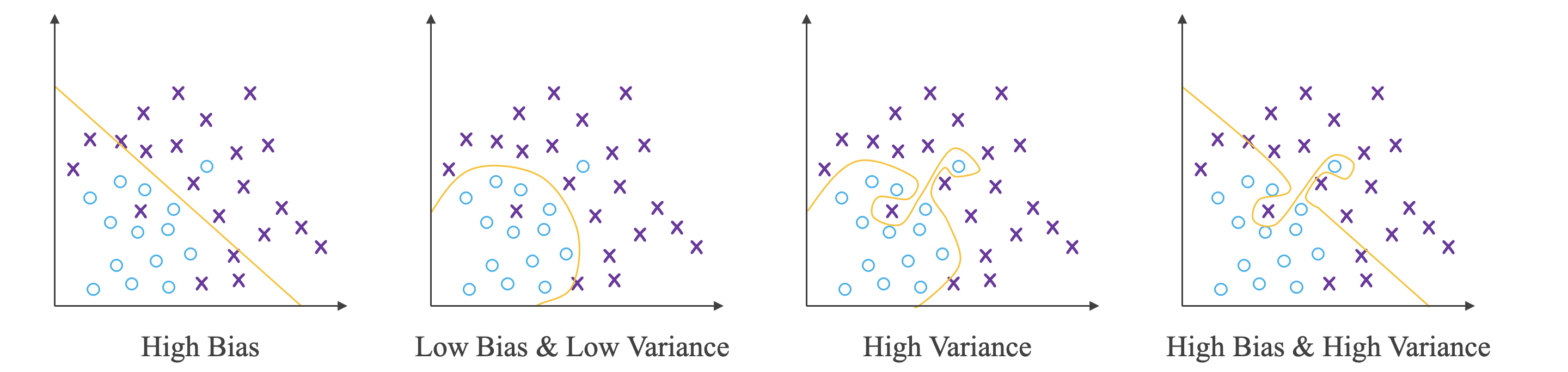
机器学习的基本方法:
- 高方差 (High Variance):过拟合,增加训练样本数据,进行正则化,选择其他更复杂的神经网络模型。
- 高偏差 (High Bias):欠拟合,增加神经网络的隐藏层个数、神经元个数,延长训练时间,选择其它更复杂的神经网络模型。
正则化
正则化:
Regularization 正则化
L1 Regularization L1 正则化
L2 Regularization L2 正则化
Regularization Parameter 正则化参数
Frobenius Norm Frobenius 范数
Weight Decay 权重下降
-
对于逻辑回归:
-
L2 正则化:
\[J(w, b) = \frac{1}{m} \sum_{i = 1}^{m} L(\hat{y}^{(i)}, y^{(i)}) + \frac{\lambda}{2m} \left \| w \right \|_2^2 ,\quad \left \| w \right \|_2^2 = \sum_{j = 1}^{n_x}w_j^2 = w^\mathrm{T}w \] -
L1 正则化:
\[J(w, b) = \frac{1}{m} \sum_{i = 1}^{m} L(\hat{y}^{(i)}, y^{(i)}) + \frac{\lambda}{2m} \left \| w \right \|_1 ,\quad \left \| w \right \|_1 = \sum_{j = 1}^{n_x}\left | w_j \right | \] -
其中 \(\lambda\) 是超参数。
-
与 L2 正则化相比,L1 正则化得到的 \(w\) 更加稀疏,即很多 \(w\) 为零值,节约存储空间。
-
然而,L1 正则化在解决高方差 (High Variance) 方面比 L2 正则化并不更具优势。而且 L1 的在微分求导方面比较复杂,所以一般 L2 更加常用。
-
-
对于深层神经网络:
\[J(w^{[1]}, b^{[1]}, \cdots , w^{[L]}, b^{[L]}) = \frac{1}{m} \sum_{i = 1}^{m} L(\hat{y}^{(i)}, y^{(i)}) + \frac{\lambda}{2m} \sum_{l=1}^L \left \| w^{[l]}\right \|_F^2 ,\quad \left \| w^{[l]} \right \|_F^2 = \sum_{i = 1}^{n^{[l]}} \sum_{j = 1}^{n^{[l-1]}}(w_{ij}^{[l]})^2 \]- 其中 \(\left \| w^{[l]} \right \|_F\) 是 Frobenius 范数。
-
由于加入了正则化项,梯度下降算法中的 \(dw^{[l]}\) 计算表达式需要做如下修改:
\[dw^{[l]} = dw^{[l]}_{before} + \frac{\lambda}{m}w^{[l]} \\ w^{[l]} := w^{[l]} − \alpha \cdot dw^{[l]} = (1 - \alpha \frac{\lambda}{m})w^{[l]} - \alpha \cdot dw_{before}^{[l]} \]
丢弃法正则化:
Dropout Regularization 丢弃法
Inverted Dropout Technique 反向随机失活技术
- 丢弃法是指在深度学习网络的训练过程中,对于每层的神经元,按照一定的概率将其暂时从网络中丢弃。也就是说,每次训练时,每一层都有部分神经元不工作,起到简化复杂网络模型的效果,从而避免发生过拟合。
dl = np.random.rand(al.shape[0], al.shape[1]) < keep_prob # keep_prob 是要保留的神经元比例
al = np.multiply(al, dl)
al /= keep_prob # 使下一层神经元的输入值尽量保持不变
- 对于 \(m\) 个样本,单次迭代训练时,随机删除掉隐藏层一定数量的神经元,在删除后的剩下的神经元上正向和反向更新权重 \(w\) 和常数项 \(b\)。
- 下一次迭代中,再恢复之前删除的神经元,重新随机删除一定数量的神经元,进行正向和反向更新 \(w\) 和 \(b\),不断重复上述过程,直至迭代训练完成。
- 训练结束后,在测试和实际应用模型时,不需要进行随机删减神经元,所有的神经元都在工作。
理解丢弃法:
- 不同隐藏层的系数
keep_prob可以不同。 - 神经元越多的隐藏层,
keep_prob可以设置得小一些;神经元越少的隐藏层,keep_out可以设置的大一些。
其他正则化方法:
Data Augmentation 数据增强
Early Stopping 早停法
- 数据增强:对已有的图片进行水平翻转、垂直翻转、任意角度旋转、缩放或扩大等。
- 早停法:一个神经网络模型随着迭代训练次数增加,训练集代价一般是单调减小的,而测试集代价先减后增。训练次数过多时,模型会对训练样本拟合的越来越好,但是对验证集拟合效果逐渐变差,即发生了过拟合。因此,可以通过训练集代价和测试集代价随着迭代次数的变化趋势,选择合适的迭代次数。
输入
标准化输入:
Normalizing 标准化
-
标准化:将原始数据减去其均值 \(\mu\) ,再除以方差 \(\sigma^2\)
\[\mu = \frac{1}{m} \sum_{i = 1}^m X^{(i)} ,\quad \sigma^2 = \frac{1}{m} \sum_{i = 1}^m (X^{(i)})^2 ,\quad X := \frac{X −\mu}{\sigma^2} \] -
训练集和测试集都要进行标准化操作。
梯度
梯度消失和梯度爆炸:
Vanishing Gradients 梯度消失
Exploding Gradients 梯度爆炸
- 当训练一个层数非常多的神经网络时,计算得到的梯度可能非常小或非常大。
神经网络的权重初始化:
-
这是改善梯度消失和梯度爆炸的一种方法。
-
如果激活函数是 \(tanh\):
w[l] = np.random.randn(n[l], n[l-1]) * np.sqrt(1 / n[l-1]) -
如果激活函数是 \(ReLU\):
w[l] = np.random.randn(n[l], n[l-1]) * np.sqrt(2 / n[l-1]) -
其他初始化方法:
w[l] = np.random.randn(n[l], n[l-1]) * np.sqrt(2 / n[l-1] * n[l])
梯度的数值逼近:
- 函数 \(g\) 在 \(\theta\) 点的梯度可以表示为:\[g(\theta) = \frac{f(\theta + \varepsilon) - f(\theta - \varepsilon)}{2\varepsilon} \]
梯度检验:
-
将代价函数 \(J(W^{[1]}, b^{[1]}, \cdots, W^{[L]}, b^{[L]})\) 表示为 \(J(\theta)\)。
-
由 \(J(\theta)\) 计算 \(d\theta_i\):
\[d\theta_i = \frac{J(\theta_1, \theta_2, \cdots, \theta_i + \varepsilon, \cdots) - J(\theta_1, \theta_2, \cdots, \theta_i - \varepsilon, \cdots)}{2\varepsilon} \] -
由 \(d\theta_i\) 得 \(d\theta_{approx}\)。
-
-
由反向传播 \(dW^{[1]}, db^{[1]}, \cdots, dW^{[L]}, db^{[L]}\) 得到 \(d\theta\)。
-
计算 \(d\theta_{approx}\) 和 \(d\theta\) 的欧式距离比较二者相似度。
\[\frac{\left \| d\theta_{approx} - d\theta \right \|_2}{\left \| d\theta_{approx} \right \|_2 + \left \| d\theta \right \|_2} \]
关于梯度检验的注记:
- 不要在整个训练过程中都进行梯度检查,仅仅作为 debug 使用。
- 如果梯度检查出现错误,找到对应出错的梯度,检查其推导是否出现错误。
- 注意不要忽略正则化项,计算近似梯度的时候要包括进去。
- 梯度检查时关闭 Dropout,检查完毕后再打开 Dropout。
- 随机初始化时运行梯度检查,经过一些训练后再进行梯度检查(不常用)。
优化算法
Mini-batch
Mini-batch 梯度下降:
Batch Gradient Descent 批梯度下降法
Mini-batch Gradient Descent Mini-batch 梯度下降法
-
如果样本数量 \(m\) 很大,例如达到百万数量级,训练速度往往会很慢,因为每次迭代都要对所有样本进行进行求和运算和矩阵运算。
-
我们可以把 \(m\) 个训练样本分成若干个子集,称为 Mini-batches,这样每个子集包含的数据量就小了,然后每次在单一子集上进行神经网络训练,速度就会大大提高。这种梯度下降算法叫做 Mini-batch 梯度下降法。
-
符号 \(X^{\{t\}}\), \(Y^{\{t\}}\):第 \(t\) 组 Mini-batch。
-
流程:
for t in range(T): Forward Propagation Compute Cost Function Backward Propagation W := W − alpha * dW b := b − alpha * db- 对于 Mini-batch 梯度下降法,一个 epoch 会进行 T 次梯度下降。
- Mini-batch 可以进行多次 epoch,每次迭代,最好将总体训练数据重新打乱、重新分成 T 组。
理解 Mini-batch 梯度下降:
Stochastic Gradient Descent 随机梯度下降
- 使用 Batch Gradient Descent,随着迭代次数增加,代价函数是不断减小的;使用 Mini-batch Gradient Descent,随着在不同的 Mini-batch 上迭代训练,其代价不是单调下降,而是受类似噪音的影响,出现振荡,但整体的趋势是下降的。
- 当 Mini-batch 的大小为 \(m\) 时,即为 Batch Gradient Descent;当 Mini-batch 的大小为 \(1\) 时,即为 Stochastic gradient descent。Mini-batch 的大小推荐设置为 \(64, 128, 256, 512\)。
- Mini-batch 最终会在最小值附近来回波动,难以真正达到最小值处,而且在数值处理上不能使用向量化的方法来提高运算速度。
指数加权平均
指数加权平均:
Exponentially Weighted Averages 指数加权平均
- 公式:\[V_t = \beta V_{t-1} + (1-\beta)\theta_t \]\(\beta\) 值决定了指数加权平均的天数,近似表示为:\[\frac{1}{1 - \beta} \]例如 \(\beta=0.9\) 表示将前 \(10\) 天进行指数加权平均。
理解指数加权平均:
v = 0
while (true):
get next theta
v := beta * v + (1 - beta) * theta
指数加权平均的参数修正:
-
开始时我们设置 \(V_0 = 0\),所以初始值会相对小一些,直到后面受前面的影响渐渐变小,趋于正常。
-
可以在每次计算完 \(V_t\) 时,作如下处理:
\[V_t = \frac{V_t}{1 - \beta^t} \]
其他优化算法
动量梯度下降:
Gradient Descent With Momentum 动量梯度下降
-
在每次训练时,对梯度进行指数加权平均处理,然后用得到的梯度值更新权重 \(w\) 和常数项 \(b\)。
-
公式:
\[V_{dW} = \beta \cdot V_{dW} + (1 − \beta) \cdot dW ,\quad V_{db} = \beta \cdot V_{db} + (1 − \beta) \cdot db \\ W = W - \alpha V_{dW} ,\quad b = b - \alpha V_{db} \] -
超参数:\(\alpha\)、\(\beta\)。
RMSprop:
Root Mean Square Prop (RMSprop) 均方根传递
-
公式:
\[S_W = \beta S_{dW} + (1 − \beta)dW^2 ,\quad S_b = \beta S_{db} + (1 − \beta)db^2 \\ W := W − \alpha \frac{dW}{\sqrt{S_W} + \varepsilon} ,\quad b := b − \alpha \frac{db}{\sqrt{S_b} + \varepsilon} \] -
为了避免 RMSprop 算法中分母为零,通常可以在分母增加一个极小的常数 \(\varepsilon\)。
Adam 优化算法:
Adaptive Moment Estimation 自适应矩阵估计
-
结合了动量梯度下降算法和 RMSprop 算法。
-
公式:
\[\begin{aligned} V_{dW} = \beta_1 V_{dW} + (1 − \beta_1)dW &,\quad V_{db} = \beta_1 V_{db} + (1 − \beta_1)db \\ S_{dW} = \beta_2 S_{dW} + (1 − \beta_2)dW^2 &,\quad S_{db} = \beta_2 S_{db} + (1 − \beta_2)db^2 \\ V^{corrected}_{dW} = \frac{V_{dW}}{1 − \beta^t_1} &,\quad V^{corrected}_{db} = \frac{V_{db}}{1 − \beta^t_1} \\ S^{corrected}_{dW} = \frac{S_{dW}}{1 − \beta^t_2} &,\quad S^{corrected}_{db} = \frac{S_{db}}{1 − \beta^t_2} \\ W := W − \alpha \frac{V^{corrected}_{dW}}{\sqrt{S^{corrected}_{dW}} + \varepsilon} &,\quad b := b − \alpha \frac{V^{corrected}_{db}}{\sqrt{S^{corrected}_{db}} + \varepsilon} \end{aligned} \] -
超参数:\(\alpha\)、\(\beta_1\)、\(\beta_2\)、\(\varepsilon\)。
学习率衰减:
Learning Rate Decay 学习率衰减
-
随着迭代次数增加,令学习因子 \(\alpha\) 逐渐减小。
-
公式:
\[\alpha = \frac{1}{1 + decay\_rate * epoch}\alpha_0 \quad or \quad \alpha = 0.95^{epoch}\alpha_0 \quad or \quad \alpha = \frac{k}{\sqrt{epoch}}\alpha_0 \quad or \quad \alpha = \frac{k}{\sqrt{t}}\alpha_0 \]- \(deacy\_rate\)、\(k\) 是可调参数,\(epoch\) 是训练次数,\(t\) 是 Mini-batch 数量。
局部最优化
局部最优化问题:
Local Optima 局部最优化
Saddle Point 鞍点
Plateau 停滞区
- 大部分梯度为零的 "最优点" 并不是这些凹槽处,而是马鞍状的鞍点 (Saddle Point)。
- 梯度为零并不能保证都是极小值 (Convex),也有可能是极大值 (Concave)。
- 类似马鞍状的停滞区 (Plateaus) 会降低神经网络学习速度,但是由于随机扰动,梯度一般能够离开鞍点 (Saddle Point),继续前进,只是在停滞区 (Plateaus) 上花费了太多时间。
总结
-
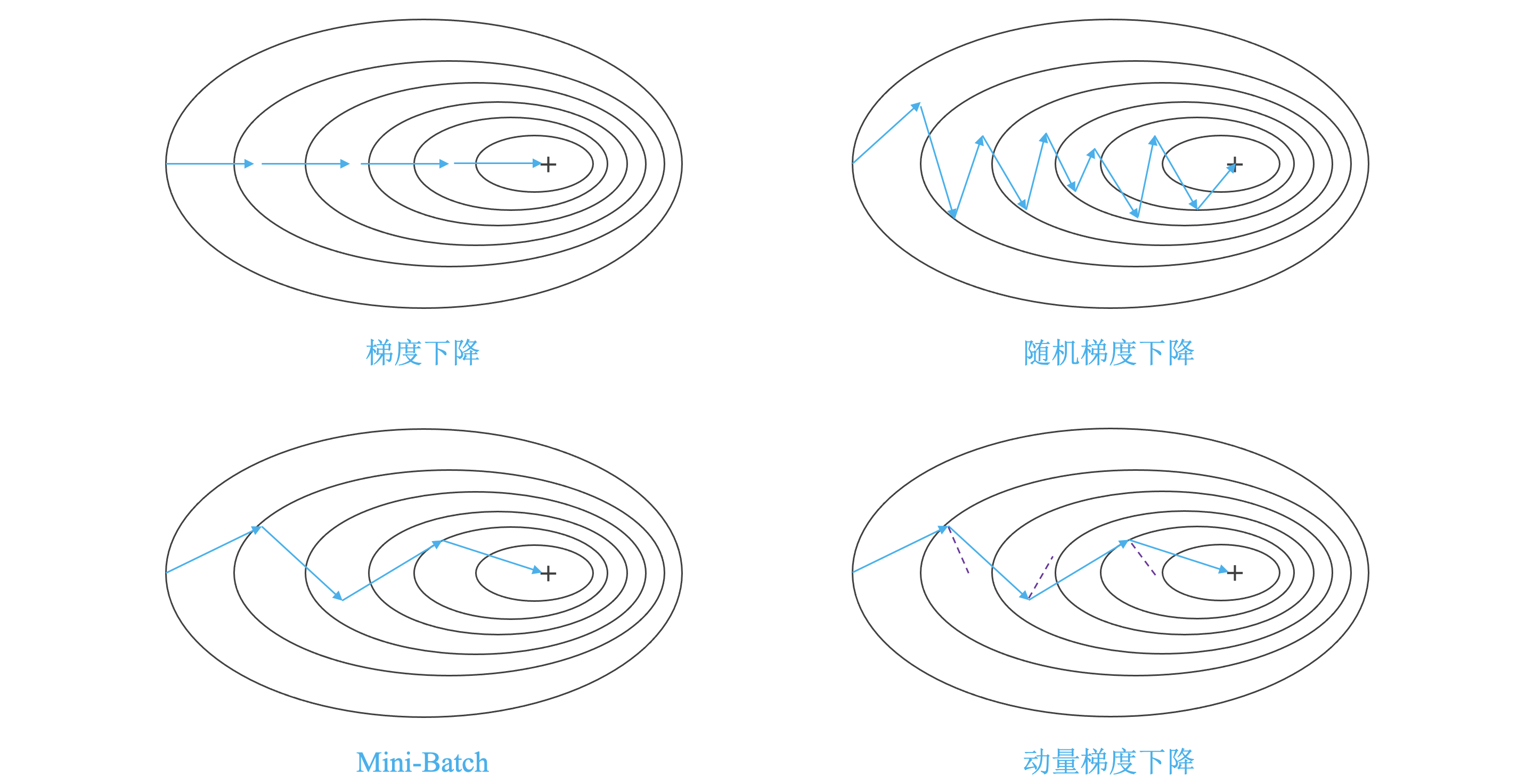
"+" 表示损失的最小值。
-
梯度下降 (Gradient Descent) 与随机梯度下降 (Stochastic Gradient Descent, SGD):
- 梯度下降:
X = data_input Y = labels parameters = initialize_parameters(layers_dims) for i in range(0, num_iterations): a, caches = forward_propagation(X, parameters) cost = compute_cost(a, Y) grads = backward_propagation(a, caches, parameters) parameters = update_parameters(parameters, grads)- 随机梯度下降:
X = data_input Y = labels parameters = initialize_parameters(layers_dims) for i in range(0, num_iterations): for j in range(0, m): a, caches = forward_propagation(X[:,j], parameters) cost = compute_cost(a, Y[:,j]) grads = backward_propagation(a, caches, parameters) parameters = update_parameters(parameters, grads)- 对于随机梯度下降,在更新梯度之前,只使用 1 个训练样例。
- 当训练集大时,随机梯度下降可以更新的更快,但是这些参数会向最小值摆动而不是平稳地收敛。
-
小批量梯度下降 (Mini-batch):
- 如果既不使用整个训练集,也不使用一个训练示例,来执行每次更新,则通常会得到更快的结果。
- 小批量梯度下降通常会胜过梯度下降或随机梯度下降,尤其是训练集较大时。
-
动量梯度下降 (Gradient Descent With Momentum):
- 传统的梯度下降在梯度下降过程中,振荡较大,每一点处的梯度只与当前方向有关,产生类似折线的效果,前进缓慢。
- 动量梯度下降对梯度进行指数加权平均,使当前梯度不仅与当前方向有关,还与之前的方向有关。这样处理让梯度前进方向更加平滑,减少振荡,能够更快地到达最小值处。
- 如果动量梯度下降的参数 \(\beta=0\),则它变为没有冲量的标准梯度下降。\(\beta\) 越大,更新越平滑,我们对过去的梯度的考虑也更多。
-
RMSprop:
- 对于 \(w\) 和 \(b\),如果哪个方向振荡大,就减小该方向的更新速度,从而减小振荡。
-
Adam:
- 结合了动量梯度下降和 RMSProp 的优点。
超参数 批标准化 编程框架
超参数调试
调试过程:
- 深度神经网络需要调试的超参数包括:
- 学习因子 \(\alpha\):通常来说是需要重点调试的超参数。
- 动量梯度下降因子 \(\beta\):通常来说重要程度仅次于 \(\alpha\)。
- Adam 算法参数:\(\beta_1\)、\(\beta_2\)、\(\varepsilon\)。
- 神经网络层数。
- 各隐藏层神经元个数:通常来说重要程度仅次于 \(\alpha\)。
- 学习因子下降参数 \(decay\_rate\)。
- 批量训练样本包含的样本个数 \(mini\_batch\_size\):通常来说重要程度仅次于 \(\alpha\)。
- 通常做法:
- 随机化选择参数,尽可能地得到更多种参数组合。
- 为得到更精确的最佳参数,放大表现较好的区域,对选定的区域进行由粗到细的采样。
为超参数选择合适的范围:
-
对于某些超参数,如神经网络层数、各隐藏层神经元个数,取值只能是正整数,可以进行随机均匀采样。
-
对于另一些参数,如学习因子 \(\alpha\):
-
设待调范围为 \([0.0001, 1]\),如果随机均匀采样,则 \(90\%\) 的采样点分布在 \([0.1, 1]\),但是 \(\alpha\) 的最佳取值更可能出现在 \([0.0001, 0.1]\)。
-
因此可以采用取对数的方法,线性区间是 \([a, b]\),对数区间是 \([m, n]\):
m = np.log10(a) n = np.log10(b) r = np.random.rand() r = m + (n - m) * r r = np.power(10, r)
-
-
除 \(\alpha\) 外,\(\beta\) 也不能随机均匀采样,因为 \(\beta\) 越接近 \(1\),则对 \(1/(1 - \beta)\) 的影响越大。
超参数训练的实践:
Babysitting One Model 只对一个模型进行训练
Training Many Models In Parallel 对多个模型同时进行训练
批标准化
标准化网络中的激活函数:
Batch Normalization 批标准化
-
批标准化可以让调试超参数更加简单,让模型可接受的超参数范围更大。
-
在《标准化输入》一节对输入数据进行标准化,同样,可以对 \(l\) 层的输入,即 \(A^{[l - 1]}\) 或 \(Z^{[l - 1]}\) 标准化:
\[\mu = \frac{1}{m} \sum_i z^{(i)} ,\quad \sigma^2 = \frac{1}{m} \sum_i(z_i - \mu)^2 ,\quad z_{norm}^{(i)} = \frac{z^{(i)} - \mu}{\sqrt{\sigma^2 + \varepsilon}} \]- \(m\) 是单个 Mini-batch 包含样本个数。
- \(\varepsilon\) 是为了防止分母为 \(0\)。
-
上式使得 \(z^{(i)}\) 均值为 \(0\),方差为 \(1\),但是实际并不希望这样,于是:
\[\tilde z^{(i)} = \gamma \cdot z_{noem}^{(i)} + \beta \]- \(\gamma\) 和 \(\beta\) 同 \(w\) 和 \(b\) 一样是可以通过梯度下降等算法求得的参数。
- 从激活函数的角度来讲,如果 \(z^{(i)}\) 的均值为 \(0\),处于激活函数的线性区域,不利于训练好的非线性神经网络。
将 Batch Norm 应用于神经网络:
-
整体流程:
\[X \xrightarrow{W^{[1]}, b^{[1]}} Z^{[1]} \xrightarrow[BN]{\beta^{[1]}, \gamma^{[1]}} \tilde Z^{[1]} \rightarrow A^{[1]} \rightarrow \cdots \rightarrow A^{[L - 1]} \xrightarrow{W^{[L]}, b^{[L]}} Z^{[L]} \xrightarrow[BN]{\beta^{[L]}, \gamma^{[L]}} \tilde Z^{[L]} \rightarrow A^{[L]} \] -
在 BN 中,参数 \(b\) 可以删去,需要使用梯度下降求的参数只有 \(W\)、\(\gamma\) 和 \(beta\)。
Batch Norm 为什么凑效:
Covariate Shift 列分布差异
- Batch Norm 减少了各层 \(W^{[l]}\)、\(B^{[l]}\) 之间的耦合性,让各层更加独立。
- Batch Norm 起到了轻微正则化的作用。
Batch Norm 在测试集上的使用:
- 在训练时 \(\mu\) 和 \(\sigma\) 是通过单个 Mini-batch 中的 \(m\) 个样本求得的,测试时,如果只有一个样本,求其均值和方差是没有意义的,这就要对 \(\mu\) 和 \(\sigma\) 进行估计。
- 方法一:将所有训练集放入最终的神经网络模型中,将每个隐藏层计算得到的 \(\mu^{[l]}\) 和 \(\sigma^{[l]}\) 直接作为测试过程的 \(\mu^{[l]}\) 和 \(\sigma^{[l]}\) 来使用。实际应用中一般不使用这种方法。
- 方法二:对于第 \(l\) 层隐藏层,考虑所有 Mini-batch 在该隐藏层下的 \(\mu^{[l]}\) 和 \(\sigma^{[l]}\),然后用指数加权平均的方式来预测得到当前单个样本的 \(\mu^{[l]}\) 和 \(\sigma^{[l]}\)。
多分类
Softmax 回归:
-
一般使用 Softmax 回归处理多分类问题。
-
\(C\) 代表种类个数。
-
神经网络输出层有 \(C\) 个神经元,每个神经元的输出 \(a_i^{[L]}\) 依次对应属于该类的概率。
\[a_i^{[L]} = \frac{e^{z_i^{[L]}}}{\sum_{i=1}^{[L]}e^{z_i^{[L]}}} \] -
所有的 \(a_i^{[L]}\) 组成 \(\hat y\),\(\hat y\) 维度为 \((C, 1)\)。
训练一个 Softmax 分类器:
- 对于 \(C=4\) 的多分类,损失函数为:\[L(\hat y, y)= -\sum_{j=1}^4 y_j \cdot \log \hat y_j \]代价函数为:\[J = \frac{1}{m}\sum_{i=1}^m L(\hat y, y) \]输出层反向传播的计算:\[dZ^{[L]} = A^{[L]} - Y \]
编程框架
编程框架:
- PaddlePaddle / Tensorflow / Torch
Tensorflow:
import numpy as np
import tensorflow as tf
cofficients = np.array([[1.],[-10.],[25.]])
w = tf.Variable(0,dtype=tf.float32)
x = tf.placeholder(tf.float32,[3,1])
cost = x[0][0]*w**2 + x[1][0]*w + x[2][0]
train = tf.train.GradientDescentOptimizer(0.01).minimize(cost)
init = tf.global_variables_initializer()
session = tf.Session()
session.run(init)
print(session.run(w))
for i in range(1000):
session.run(train, feed_dict=(x:coefficients))
print(session.run(w))
'''
# 另一种写法
with tf.Session() as session:
session.run(init)
print(session.run(w))
'''
参考
标签:frac,梯度,神经网络,Deep,beta,Learning,theta,alpha,dW 来源: https://www.cnblogs.com/wxy4869/p/16485510.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。