https://docs.px4.io/v1.11/zh/flight_modes/position_mc.html


")
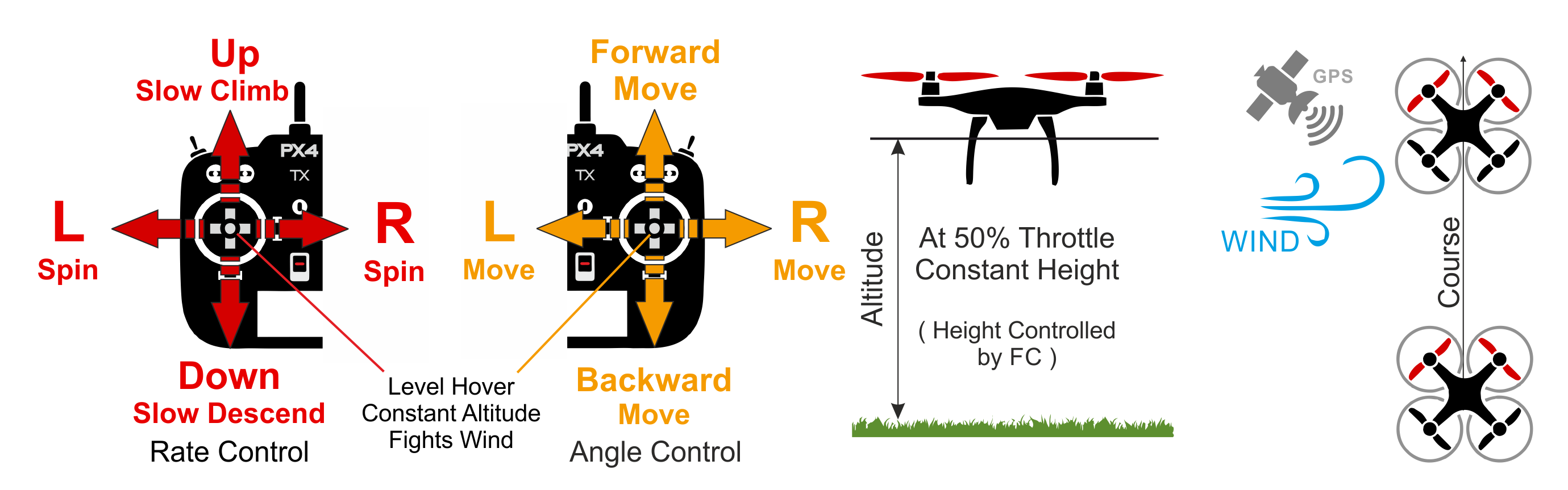
位置模式是一种易于驾驶的遥控模式,其中滚动和俯仰操纵杆在左右和前后方向(相对于飞机的“前部”)控制地面速度,并且油门控制上升-下降的速度。 当杆被释放/居中时,飞机将主动制动、改平并锁定到3D空间中的位置——补偿风和其他力。
位置模式是对于新手而言最安全的手动模式。 与高度和手动/稳定模式不同,当摇杆居中时飞机将停止运动,而不是持续运动直至被风阻减慢为止。
下图显示了模式行为(对于模式2发射器)。
在此模式下降落时必须小心。 首次在此模式下着陆时, 准备切换到 手动/稳定模式, 以便能够锁定飞机。 如果正确地检测到着陆, 电机会在触地后停止旋转, 然后在不久后锁定。 如果电机继续在较高的转速旋转或开始加速旋转, 首先切换到手动/稳定(多旋翼), 然后锁定。 请注意,由于GPS漂移,飞机可能会翻倒在地面上。

标签:居中,飞机,手动,模式,旋转,pix,无人机,锁定 来源: https://www.cnblogs.com/gooutlook/p/16462142.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。