标签:05 19 filename ptCloud test trian 2022 点云 ptCloudScene
学习汇报2022-05-19
1 点云数据处理
1.1 预处理
- 读取pcap文件,保存为pointCloud格式
clc
clear
close
filename= 'D:\leidashuji\LIDAR_0515\01.pcap'; %文件位置
veloReader = velodyneFileReader(filename,"VLP16"); % 读取.pcap文件
ptCloud_original=cell(1,veloReader.NumberOfFrames); % 定义储存原始点云数据的元组
num=60;%过多的点云帧的累积误差有点大,这里设置为60帧
for i=1:num%veloReader.NumberOfFrames
ptCloud_original{1,i}=readFrame(veloReader,i); % 依次读取每次采样周期的数据,将其保存为pointCloud格式
- 点云累积
roi = [-20 20 -20 40 -4 1]; % roi区域筛选
k=1;
indices_1{1,i} = findPointsInROI(ptCloud_original{1,i},roi);
ptCloud_interest{1,i}=select(ptCloud_original{1,i},indices_1{1,i});
end
ptCloudRef = ptCloud_interest{1}; % 将第1帧点云定义为参考点云
ptCloudCurrent = ptCloud_interest{2}; % 将第2帧定义为待处理点云
%% 下采样
gridSize = 0.5; %定义下采样网格大小
percentage=0.5;
fixed = pcdownsample(ptCloudRef, 'random', percentage);
moving = pcdownsample(ptCloudCurrent, 'random', percentage); % 下采样
tform = pcregistericp(moving, fixed, 'Metric','pointToPlane','Extrapolate', true); % matlab自带ICP算法,得到moving点云至fixed点云之间的坐标转换矩阵tform
ptCloudAligned = pctransform(ptCloudCurrent,tform); % 将第2帧点云通过求得的坐标转换矩阵进行转换
mergeSize = 0.025;
ptCloudScene = pcmerge(ptCloudRef, ptCloudAligned, mergeSize);
accumTform = tform;
mergeSize = 0.025;
ptCloudScene = pcmerge(ptCloudRef, ptCloudAligned, mergeSize);
figure
hAxes = pcshow(ptCloudScene);
title('Updated world scene')
%% 设置轴属性以更快地渲染
hAxes.CameraViewAngleMode = 'auto';
hScatter = hAxes.Children;
for i = 3:num%length(ptCloud_original) % 依次检索没帧点云
ptCloudCurrent = ptCloud_interest{i};% 将第i帧数据赋值给待处理点云 ptCloudCurrent
fixed = moving; % 将前一帧的移动点云作为后一帧点云的参考点云
moving = pcdownsample(ptCloudCurrent, 'gridAverage', gridSize);% 将待处理点云作为移动点云
% 应用CIP算法得到moving到fixed的坐标转换矩阵
tform = pcregistericp(moving, fixed, 'Metric','pointToPlane','Extrapolate', true);
% 通过当前转换矩阵乘以前面累积的转换矩阵,得到当前帧转换至第一帧的坐标转换矩阵
accumTform = affine3d(tform.T * accumTform.T);
ptCloudAligned = pctransform(ptCloudCurrent, accumTform);
% 更新全局累积的点云数据
ptCloudScene = pcmerge(ptCloudScene, ptCloudAligned, mergeSize);
hScatter.XData = ptCloudScene.Location(:,1);
hScatter.YData = ptCloudScene.Location(:,2);
hScatter.ZData = ptCloudScene.Location(:,3);
end
figure
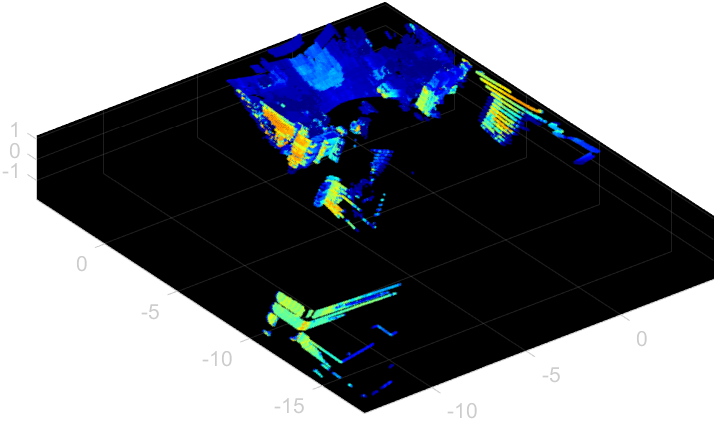
pcshow(ptCloudScene)
- 坐标转换
%% 坐标转换
thetax = 23.46*pi/180;%
thetay =0*pi/180;
thetaz = 0;
rotx = [1 0 0; ...
0 cos(thetax) -sin(thetax); ...
0 sin(thetax) cos(thetax)];
rotz=[cos(thetaz) sin(thetaz) 0; ...
-sin(thetaz) cos(thetaz) 0; ...
0 0 1];
roty=[cos(thetay) 0 sin(thetay);
0 1 0;
-sin(thetay) 0 cos(thetay)];
trans = [0, 0, 0];
tform = rigid3d(roty*rotx*rotz,trans);
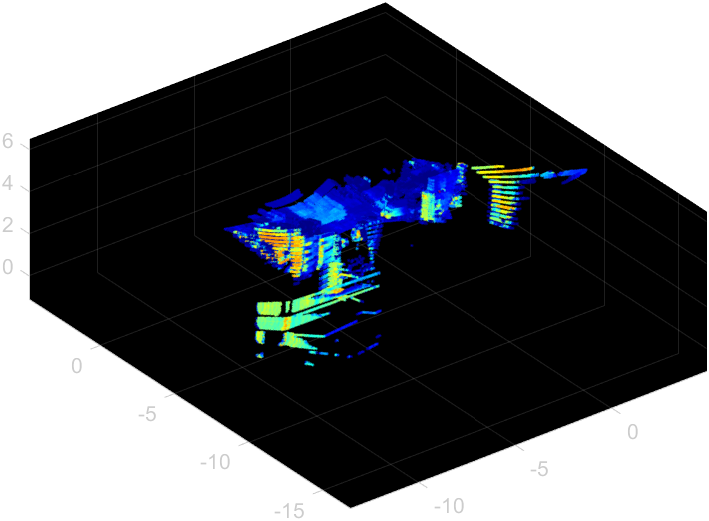
ptcloud_zuobiao=pctransform(ptCloudScene,tform);
figure
pcshow(ptcloud_zuobiao)
- 路面范围提取,保存为.csv文件

%% 路面范围提取
roi = [-1 1 2 4 -2 -0.5]; % roi区域筛选
indices_2 = findPointsInROI(ptcloud_zuobiao,roi);
ptCloud_road=select(ptcloud_zuobiao,indices_2);
figure
pcshow(ptCloud_road)
csvwrite('lidar_01.csv',ptCloud_road.Location )%将预处理提取的路面点云保存为CSV格式
%注:lidar_01.csv的名称需根据前面导入pcap文件进行更改,如lidar_02,lidar_03...
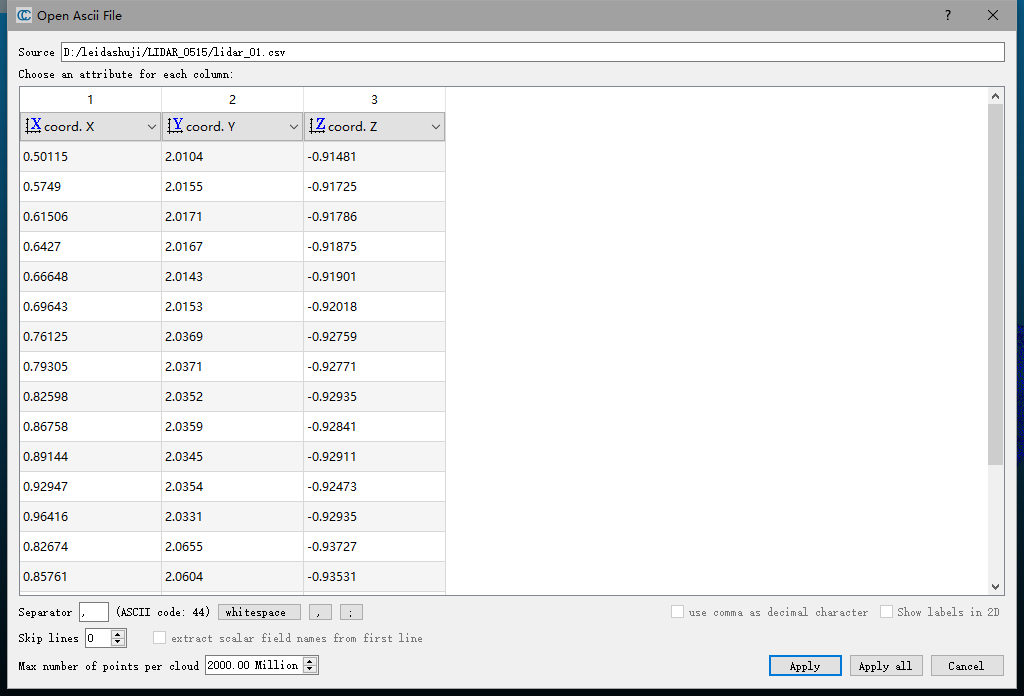
1.2 通过CloudCompare打标签流程
CloudCompare下载地址:https://www.cloudcompare.org/
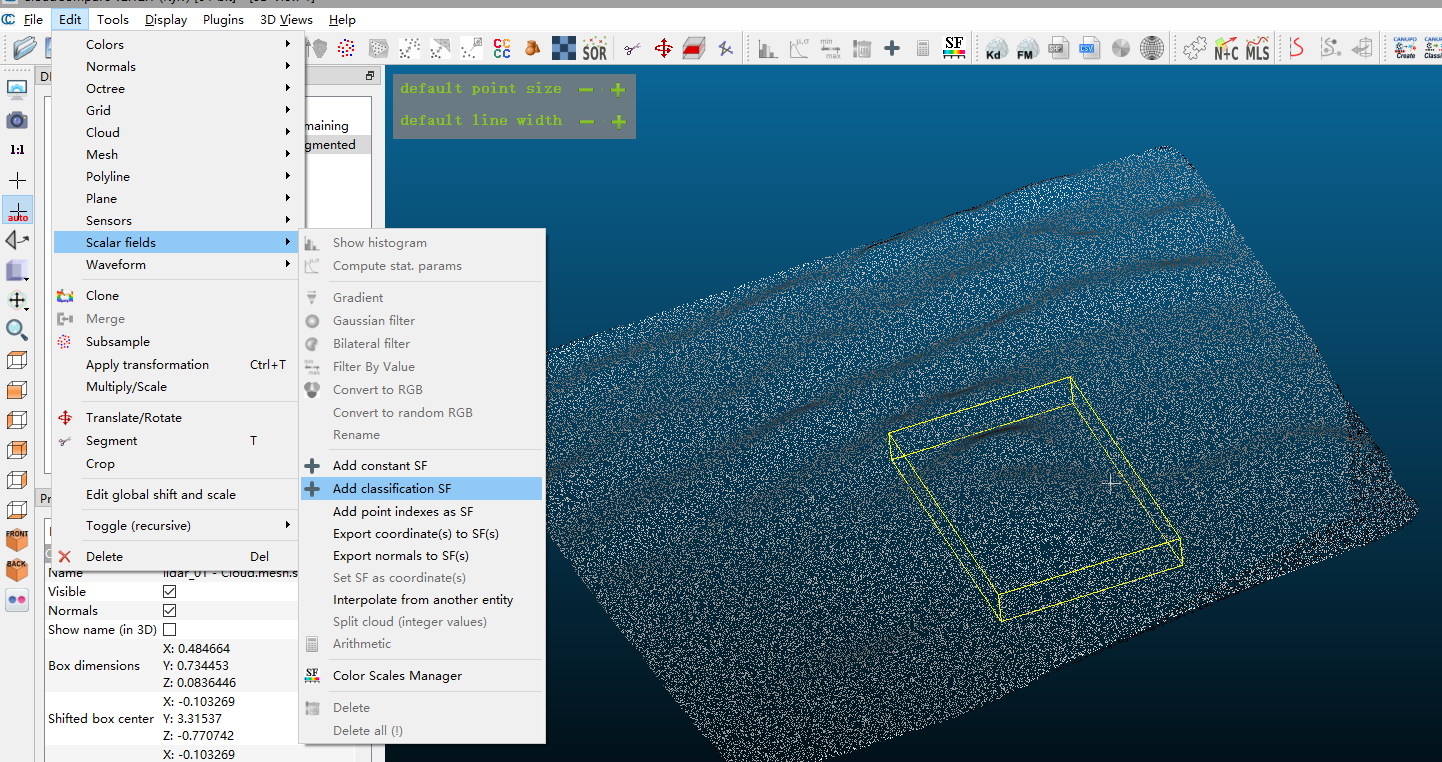
- 导入csv点云文件

- 直接apply
- 点击lidar_01-cloud
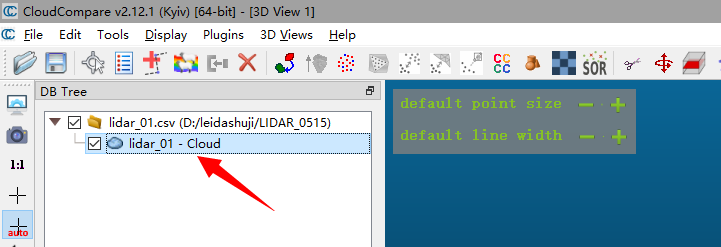
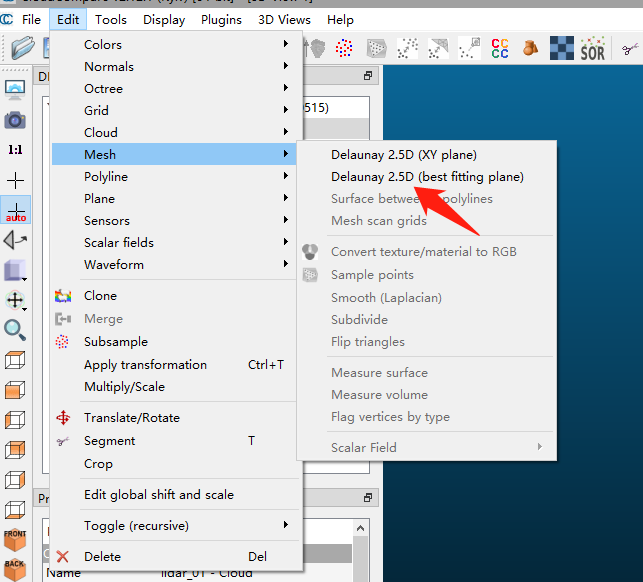
- 点击Edit>Mesh>Delaunay2.5D(best fitting plane)
- 默认0

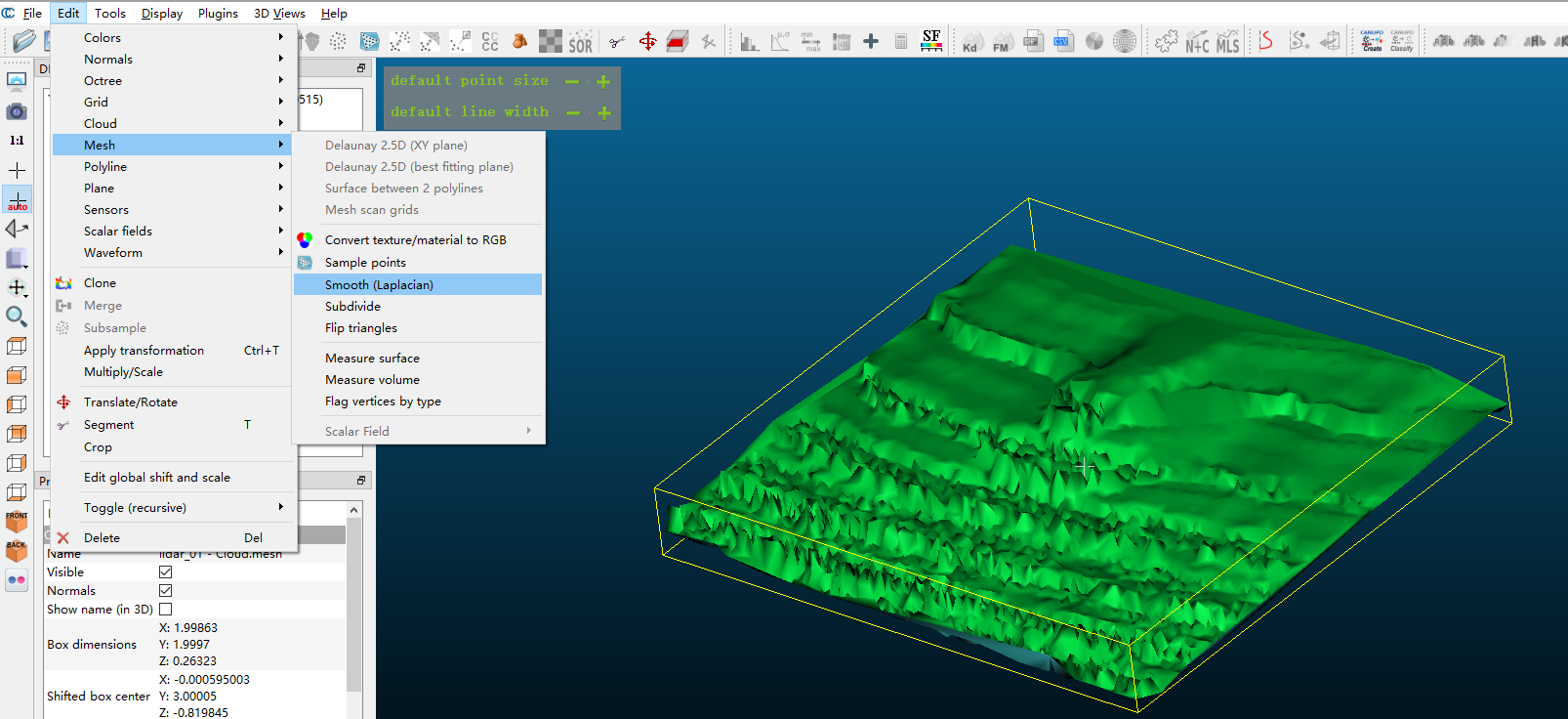
- 平滑:点击Edit>Mesh>smooth
- 迭代次数:20,平滑因子:0.2
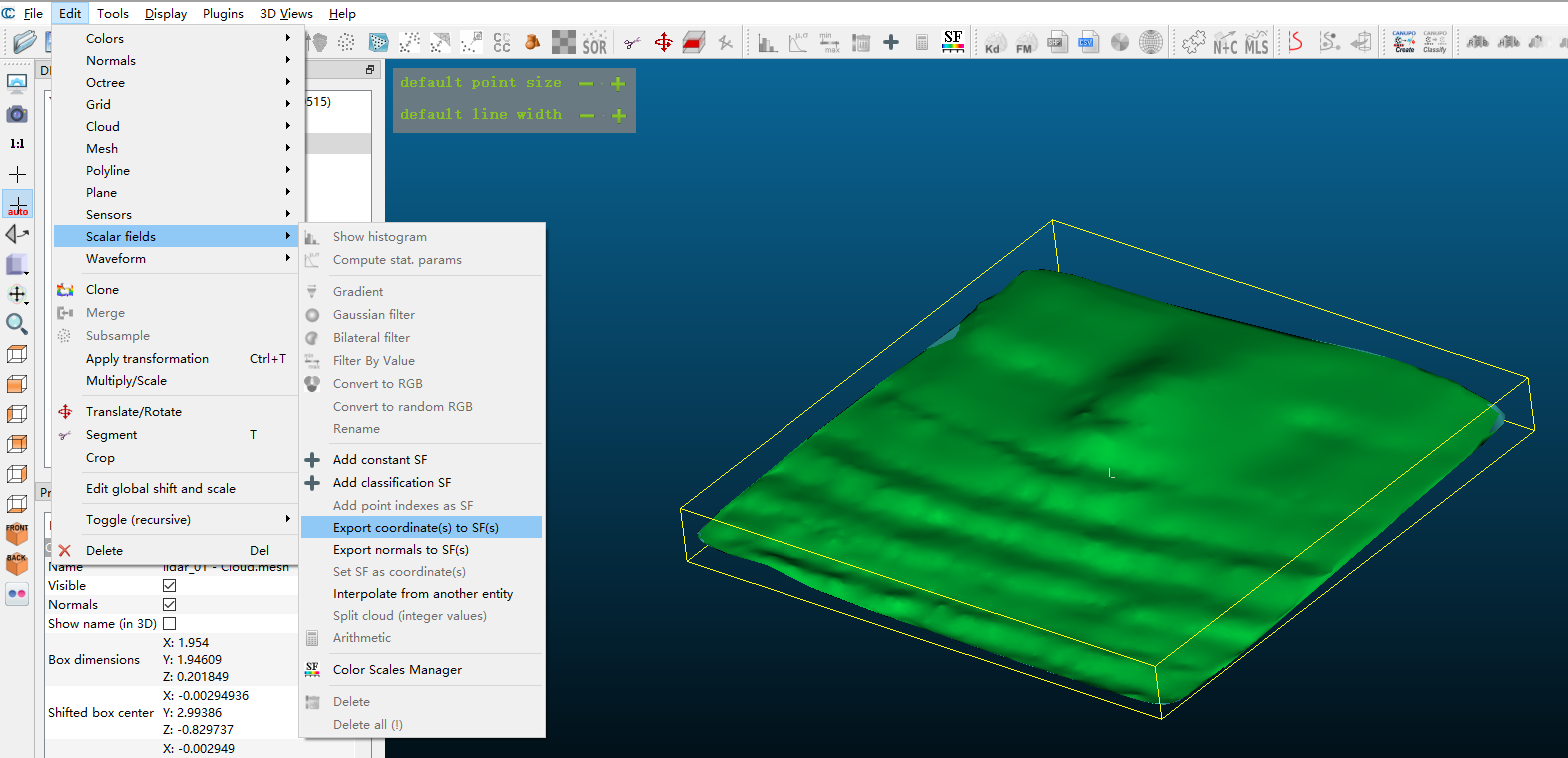
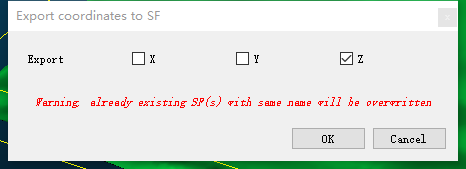
- 添加Z坐标参考,以高程图渲染点云
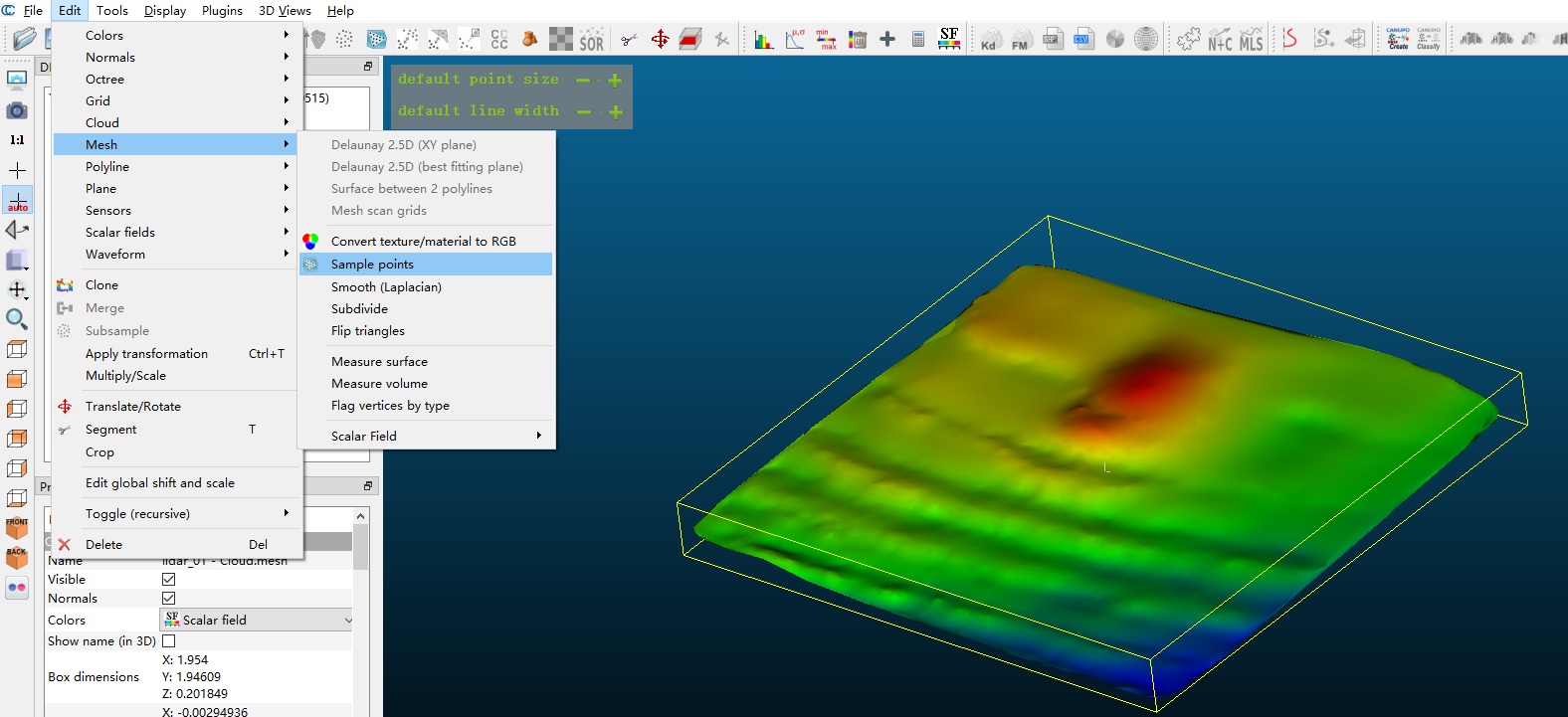
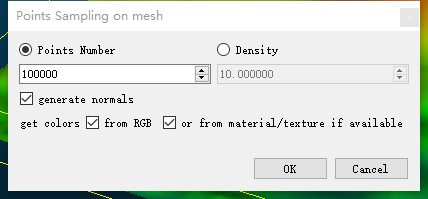
- 将.mmesh网格转换为点云格式,采样点数量设置为100000
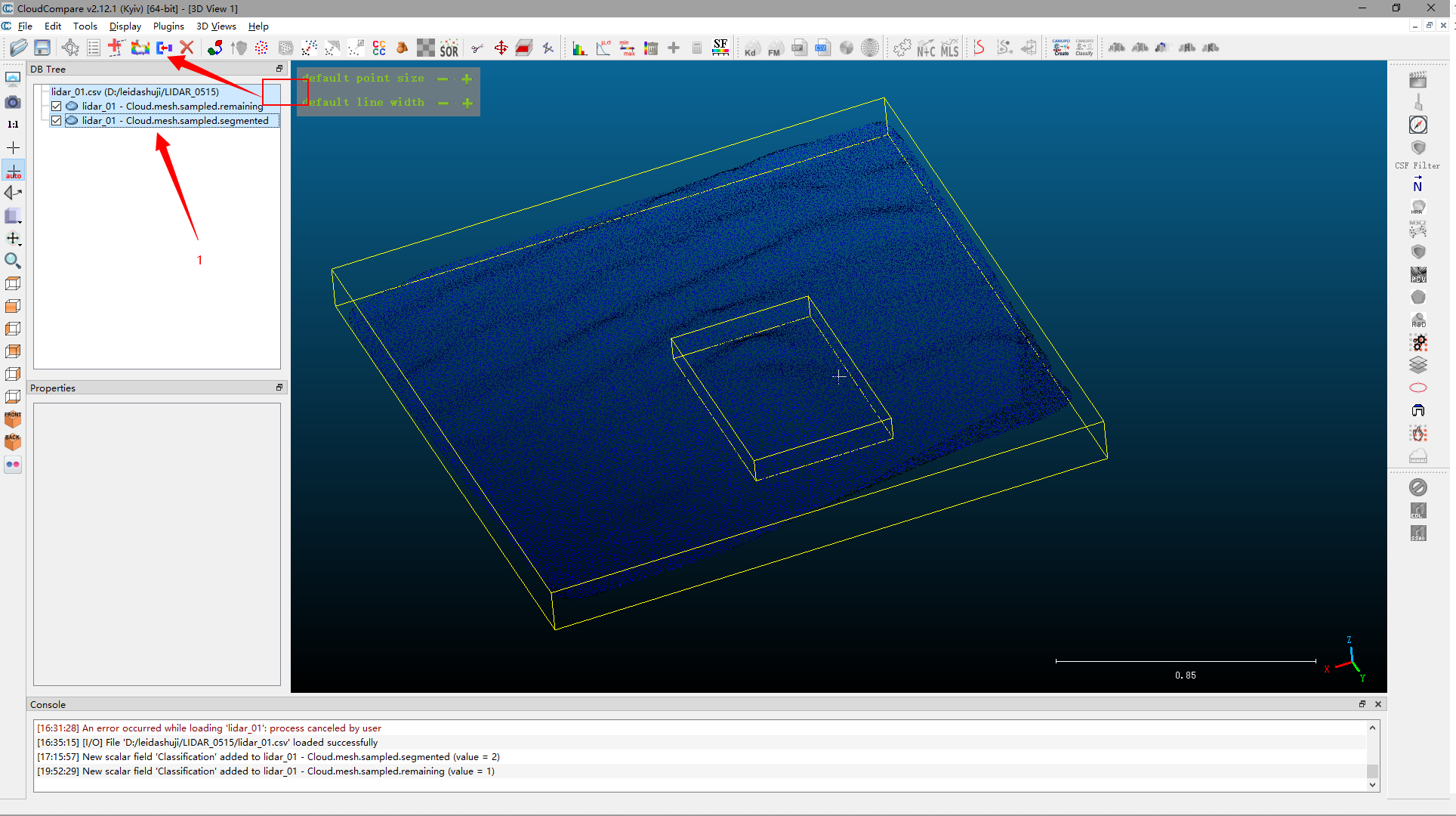
- 点击生成的.sampled数据
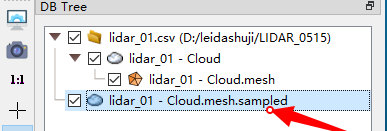
- 点击分割按钮

- 鼠标左键连续点击框选凹坑或凸起区域,注:鼠标左键点击间距应尽可能小,完成框选后鼠标右键确定。再按图中第2步,第3步操作。如果点云中有多个凹坑和凸起,重复第10步
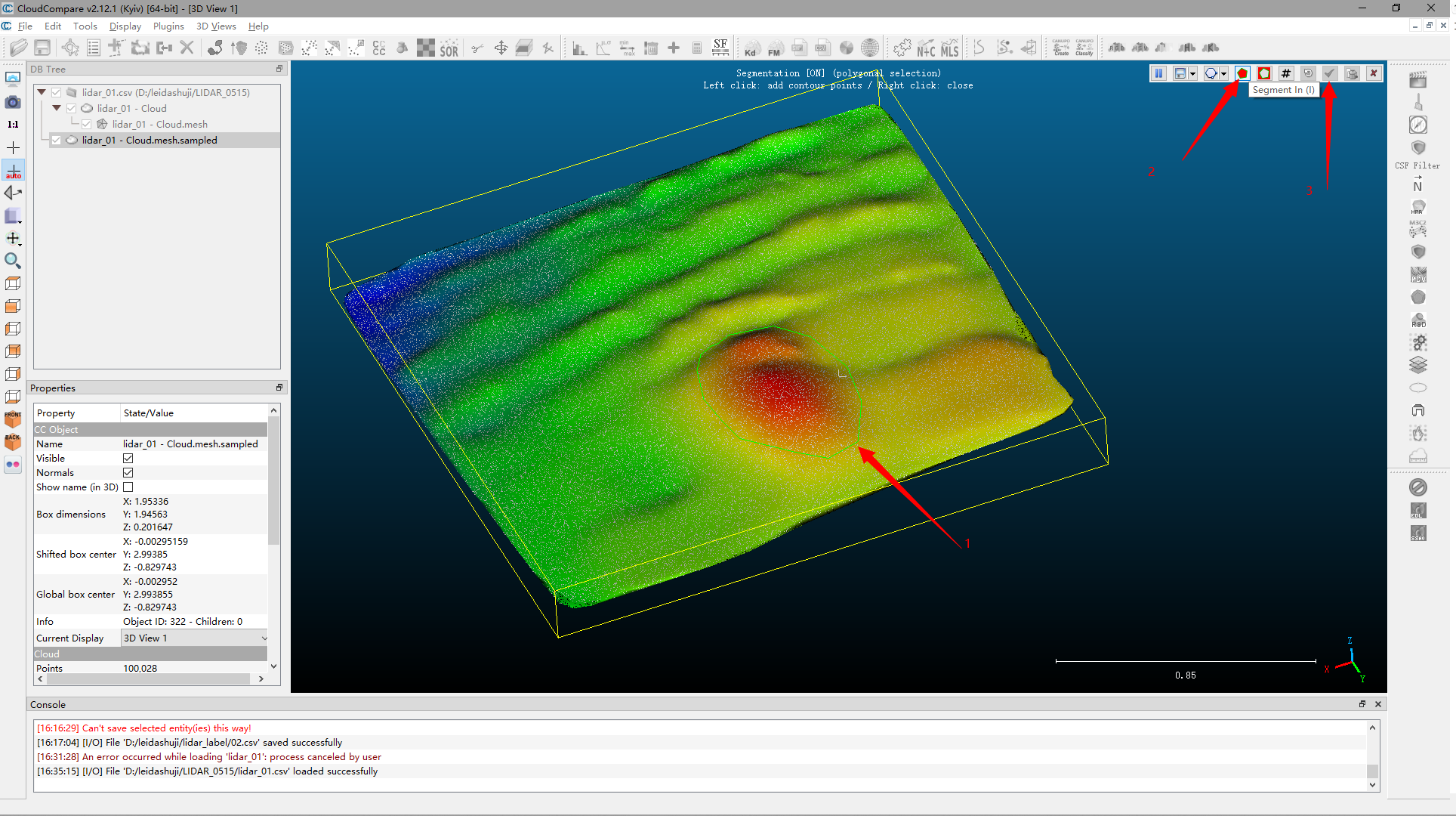
- 对分割后的点云添加标签:将lidar_01-cloud删除,方便后续保存
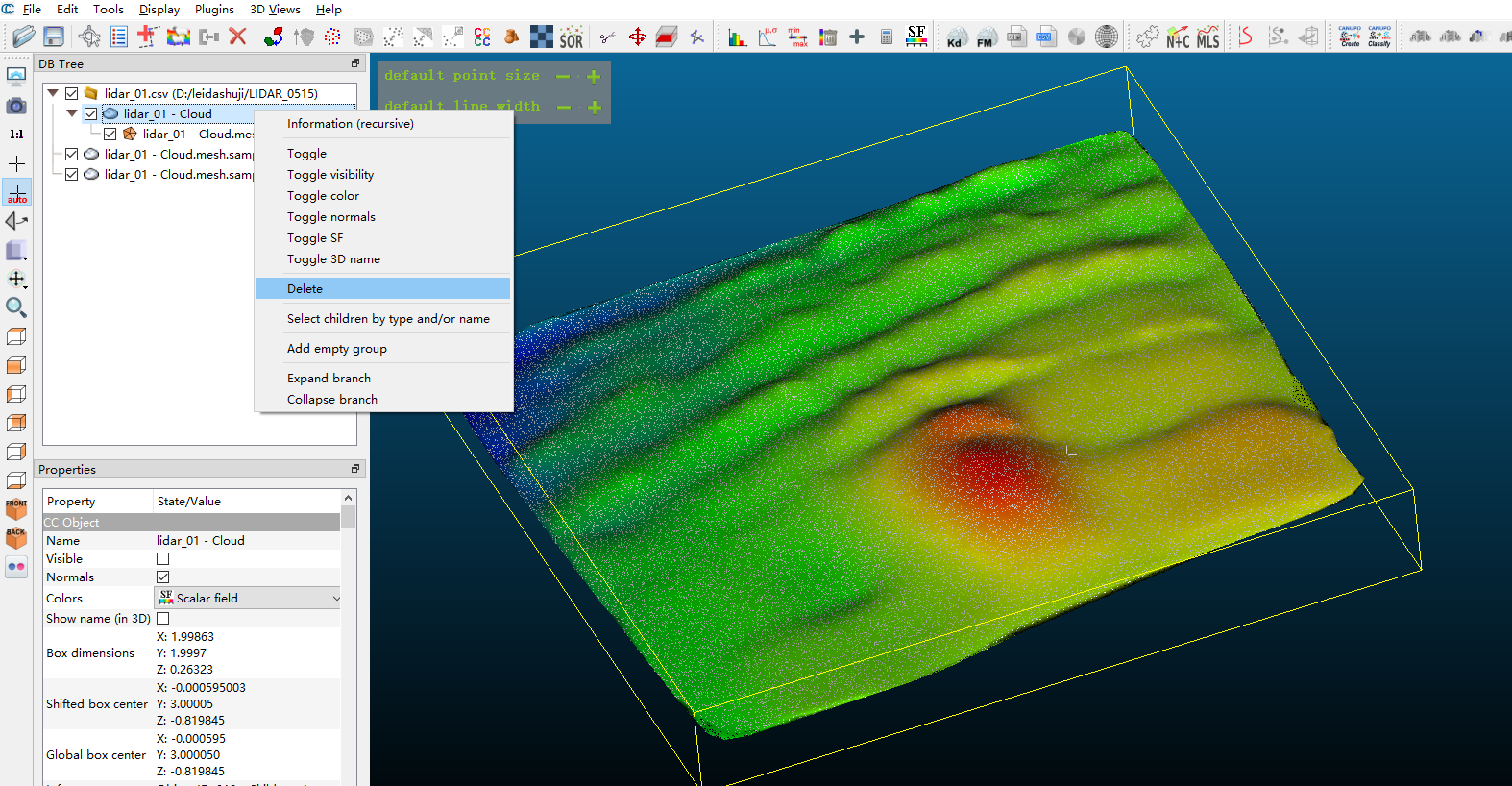
- 依次选择分割后点云,如选择第2个为凸起点云,第1个可看作是正常路面点云

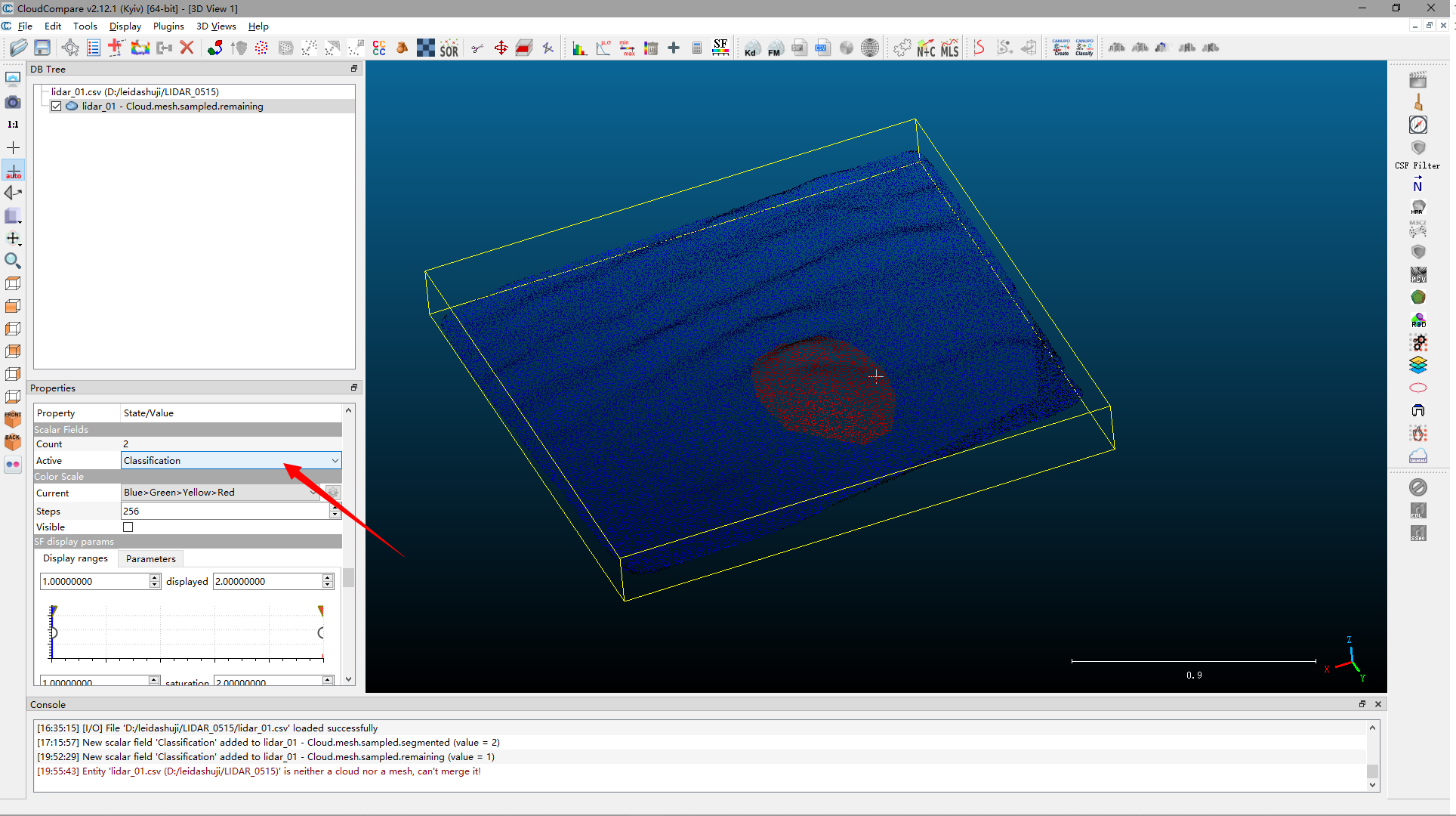
- 添加分类标签,注:统一将正常路面设为1,凸起设为2,凹坑设为3

- 标签全部设置完后,合并点云,首先全选点云(记得在第11步删除lidar_01-cloud),点击合并按钮
- 合并后选择Classification可查看分割状态
- 导出为.csv格式,点击保存按钮,保存为csv格式
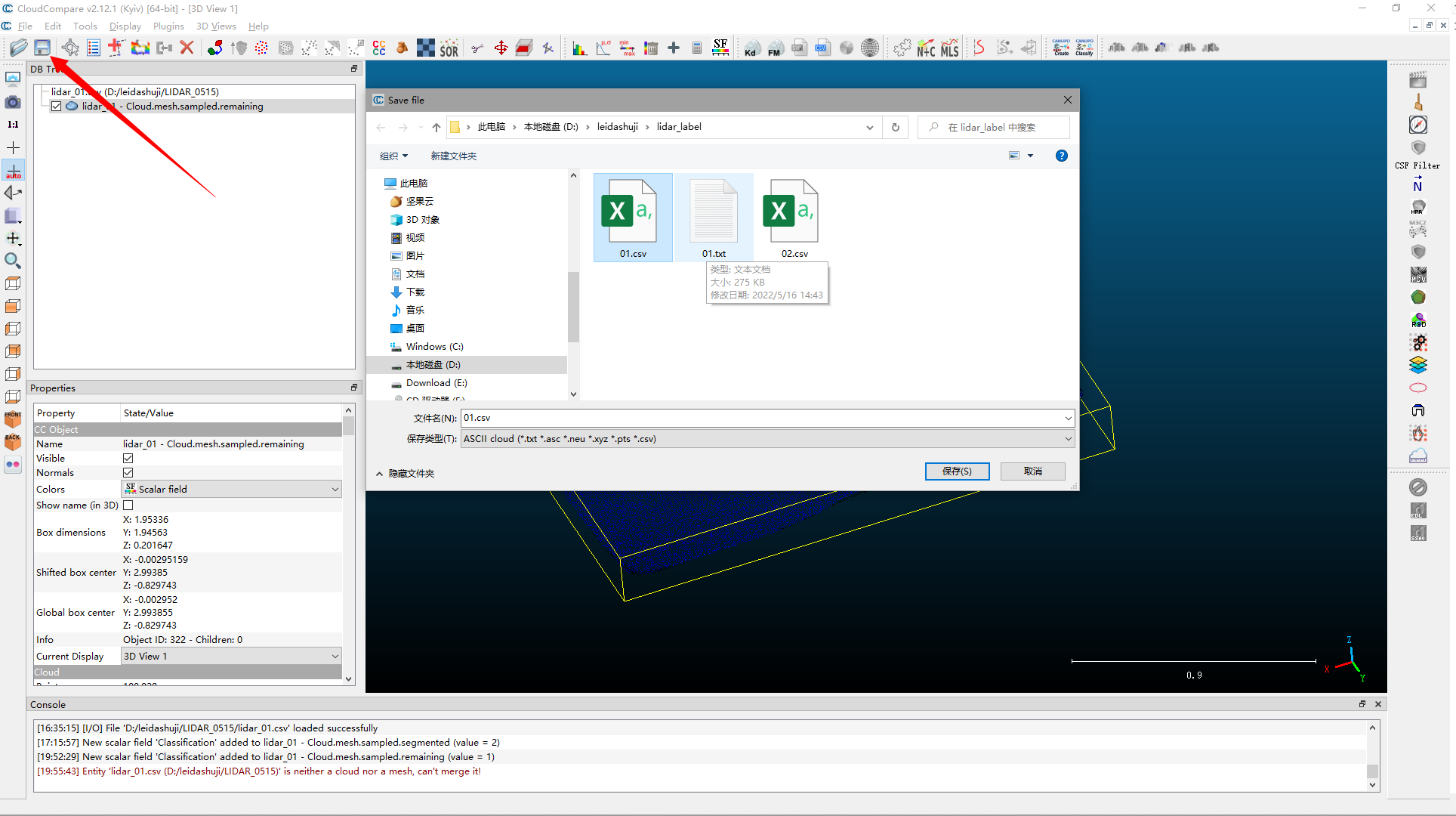
- 导出设置,精度选择8和6,分隔符选择comma,header全选

- 导出数据如图所示

2 基于pointnet的点云语义分割
2.1 pointnet介绍
-
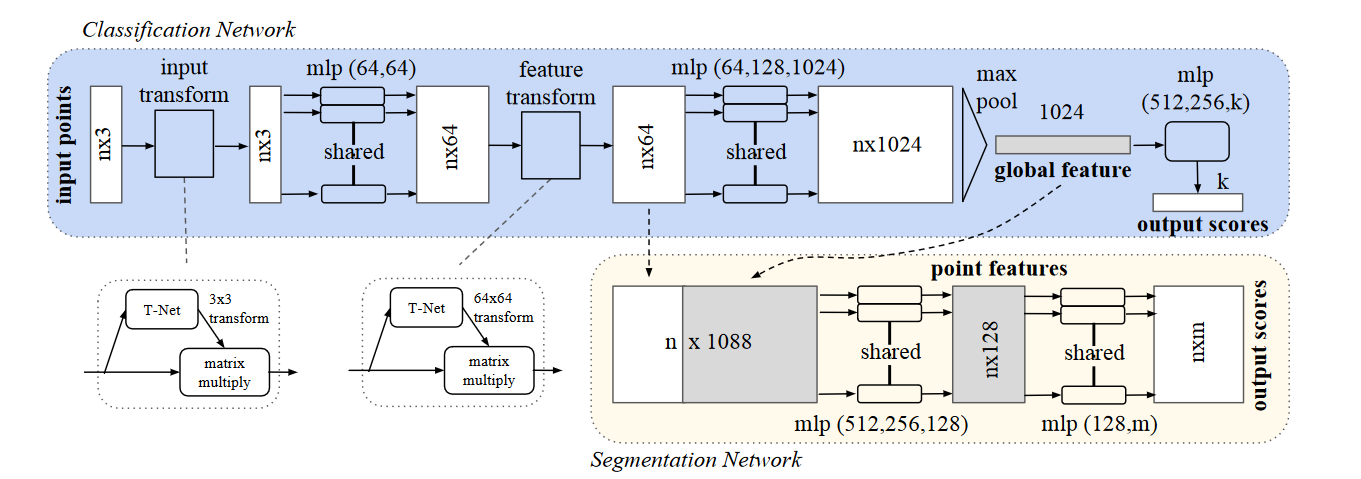
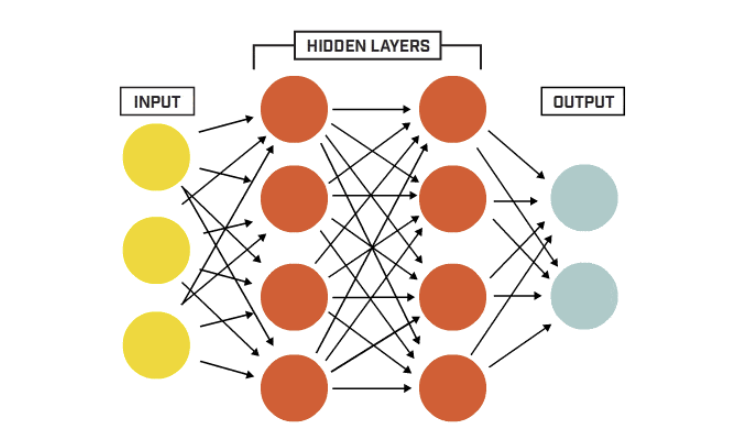
PointNet 架构。 分类网络将 n 个点作为输入,应用输入和特征变换,然后通过最大池来聚合点要素。 输出是 k 类的分类分数。 分段网络是分类网络的扩展。 它将每个点的全局和局部特征和输出连接在一起。 “mlp” 代表多层感知器,括号中的数字是层大小。 Batchnorm 用于 ReLU 的所有层。Dropout 图层用于分类网中的最后一个 mlp。
-
由于点云旋转的不变性,Pointnet的解决方法是学习一个变换矩阵T ,即T − N e t 结构。由于loss的约束,使得T 矩阵训练会学习到最有利于最终分类的变换,如把点云旋转到正面。论文的架构中,分别在输入数据后和第一层特征中使用了T 矩阵,大小为3x3和64x64。其中第二个T矩阵由于参数过多,考虑添加正则项,使其接近于正交矩阵,减少点云的信息丢失
-
其中最典型的MLP包括包括三层:输入层、隐层和输出层,MLP神经网络不同层之间是全连接的(全连接的意思就是:上一层的任何一个神经元与下一层的所有神经元都有连接)。
2.2 python复现
- modelnet40_normal_resampled数据集下载
- 该数据集针对室内场景的分割,实现的是对室内各个物体的分类
- 目前仅实现对物体分类的实现,未能实现对场景语义分割的实现

2.2 matlab实现
- csv数据处理
filename_train=dir('D:\leidashuji\lidar_label\code\train_data\*.csv');
filename_test=dir('D:\leidashuji\lidar_label\code\test_data\*.csv');
for i=1:length(filename_train)
csvname_trian=[filename_train(i,1).folder '\' filename_train(i,1).name];
csvdata_trian{i} = readmatrix(csvname_trian);
data_orgin_trian{i} =csvdata_trian{i}(:,1:4);
numPoint_trian(i)=length(data_orgin_trian{i});
pointcloud_trian{i}=pointCloud(data_orgin_trian{i}(:,1:3));
end
for i=1:length(filename_test)
csvname_test=[filename_test(i,1).folder '\' filename_test(i,1).name];
csvdata_test{i} = readmatrix(csvname_test);
data_orgin_test{i} =csvdata_test{i}(:,1:4);
numPoint_test(i)=length(data_orgin_test{i});
pointcloud_test{i}=pointCloud(data_orgin_test{i}(:,1:3));
end
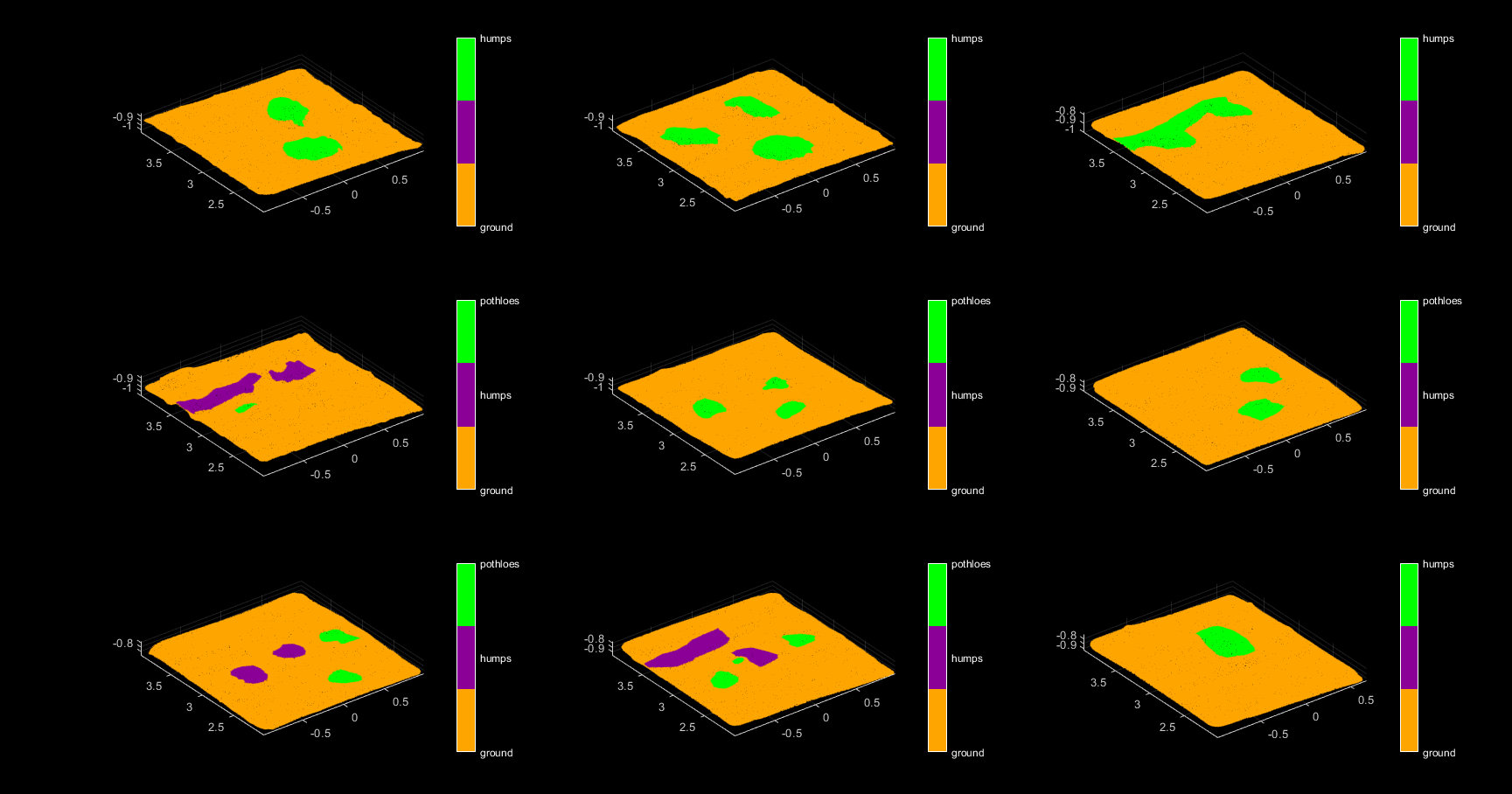
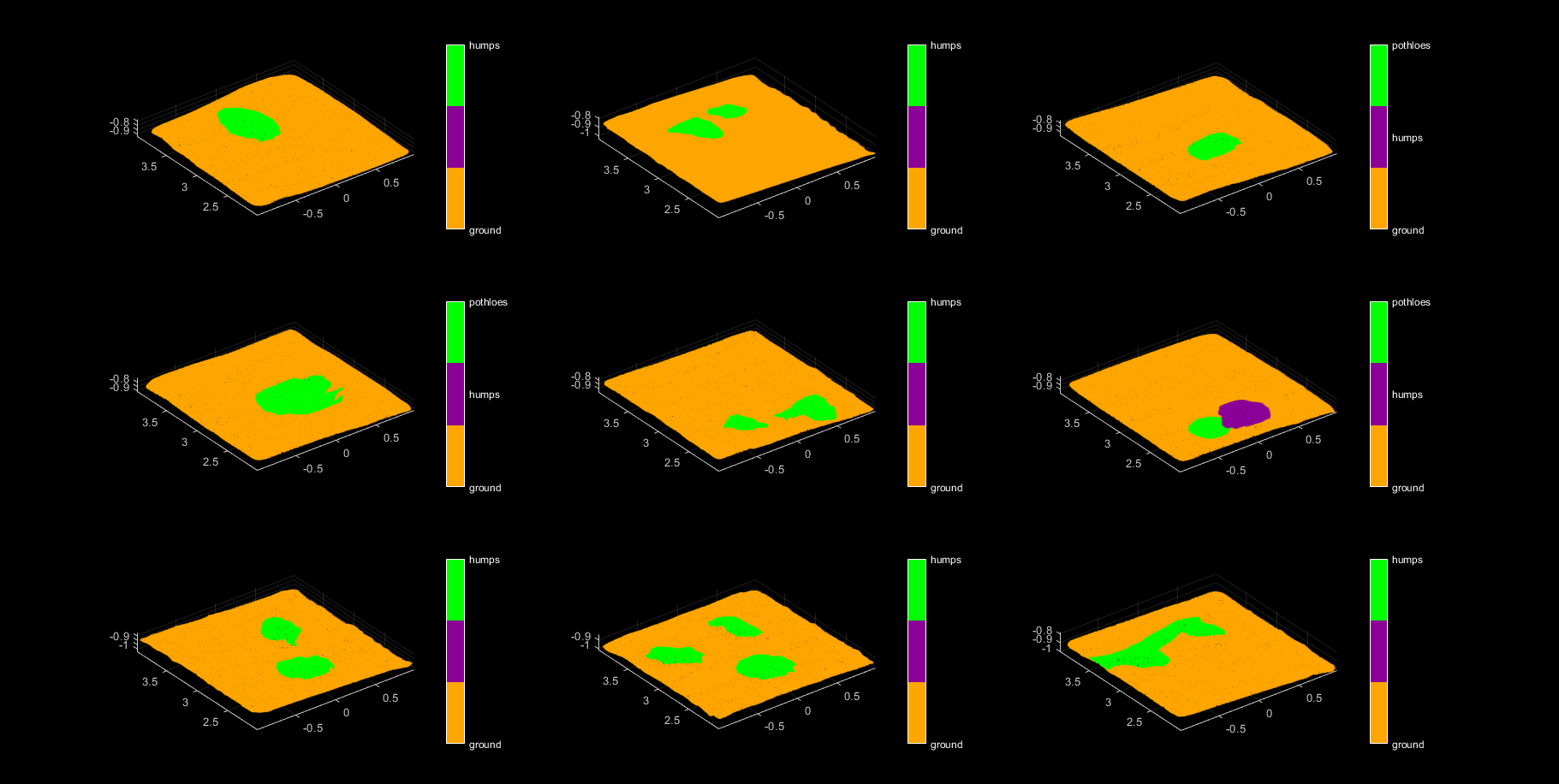
%% 预览数据
classNames = [ "ground" ;"humps" ;"pothloes"];
for i=1:9
subplot(3,3,i)
labels=data_orgin_trian{i}(:,4);
ax = pcshow(pointcloud_trian{i}.Location,labels);
helperLabelColorbar(ax,classNames);
end
- 数据预览
标签:05,19,filename,ptCloud,test,trian,2022,点云,ptCloudScene 来源: https://www.cnblogs.com/tsytian/p/16287868.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。