标签:Map map PRM free collision points phase path Probabilistic
一、原理:
Probabilistic Road Map, 分为两个过程
Learning phase和Query phase.
Learning phase:
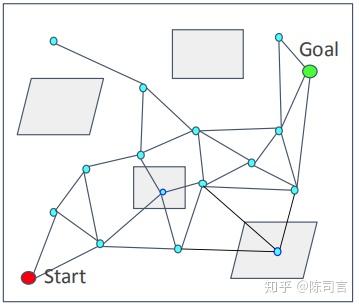
1. Sample N points in C-space.(在空间内撒N个点)
2. Delete points that are not collision-free.
3. Connect to nearest points and get collision-free segments.
4. Delete segments that are not collision free.


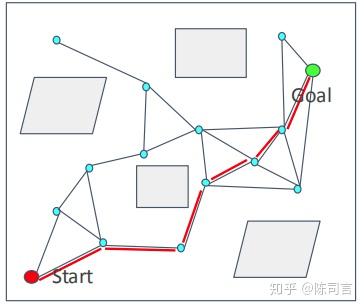
Query phase:
- Search on the road map to find a path from the start to the goal(using Dijkstra's algorithm or the A* algorithm).
- Road map is now similar with the grid map(or a simplified grid map).
二、优缺点:
优势:
概率完备;不用在整个环境搜索,简化了环境,相对于A*更加高效
劣势:
Required to solve 2 point boundary value problem.
Build graph over state space but no particular focus on generating a path.
Not efficient.
改进方法:Lazy collision-checking
一、基本思想:
Collision-checking process is time-consuming, especially in complex or high-dimensional environments. So sample points and generates segments without considering the collision.
二、流程:
- Find a path on the road map generated without collision-checking.
2. Delete the corresponding edges and nodes if the path is not collision free.
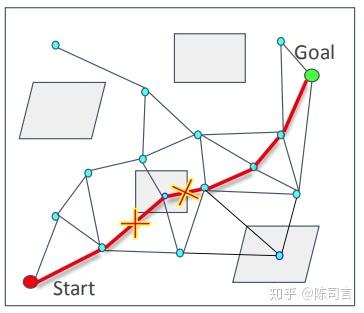
3. Restart path finding.

标签:Map,map,PRM,free,collision,points,phase,path,Probabilistic 来源: https://www.cnblogs.com/zhjblogs/p/15063108.html
本站声明: 1. iCode9 技术分享网(下文简称本站)提供的所有内容,仅供技术学习、探讨和分享; 2. 关于本站的所有留言、评论、转载及引用,纯属内容发起人的个人观点,与本站观点和立场无关; 3. 关于本站的所有言论和文字,纯属内容发起人的个人观点,与本站观点和立场无关; 4. 本站文章均是网友提供,不完全保证技术分享内容的完整性、准确性、时效性、风险性和版权归属;如您发现该文章侵犯了您的权益,可联系我们第一时间进行删除; 5. 本站为非盈利性的个人网站,所有内容不会用来进行牟利,也不会利用任何形式的广告来间接获益,纯粹是为了广大技术爱好者提供技术内容和技术思想的分享性交流网站。